马上注册,结交更多好友,享用更多功能,让你轻松玩转社区。
您需要 登录 才可以下载或查看,没有账号?注册
×
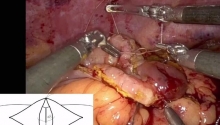
,腹腔镜下尿道吻合是泌尿外科手术(如根治性前列腺切除术、膀胱癌手术)中的关键步骤,其核心目标是恢复尿道连续性,减少术后尿漏、狭窄等并发症。以下是该技术的详细解析:
一、手术适应证
1. 主要应用场景
- 根治性前列腺切除术(尿道-膀胱颈吻合)
- 膀胱癌根治术(新膀胱-尿道吻合)
- 尿道损伤或狭窄修复术
二、手术步骤与技术要点
# 1. 术前准备
- 患者体位:头低脚高位(Trendelenburg体位),便于暴露盆腔。
- Trocar布局:通常采用5孔法(脐部镜头孔+两侧操作孔+辅助孔)。
- 关键器械:腹腔镜持针器、3-0或4-0可吸收缝线(如Vicryl)、Hem-o-lok夹。
# 2. 吻合操作流程
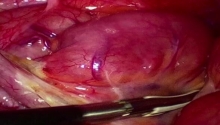
a. 尿道残端处理
- 前列腺切除后,保留尿道残端至少0.5-1cm,避免过度电灼以防缺血。
- 修剪残端边缘至光滑,保证吻合口无张力。
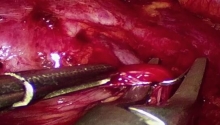
b. 缝合技术(以双半圆法为例)
- 第一针(6点方向):
- 由外向内进针(尿道残端),再由内向外出针(膀胱颈/新膀胱),打结固定。
- 避免缝穿导尿管(术中需留置18F导尿管作为支撑)。
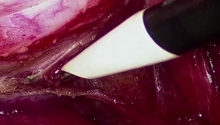
- 前半周缝合(顺时针):
- 从6点向12点方向连续缝合4-5针,间距约3mm,深度需包含黏膜下层。
- 后半周缝合(逆时针):
- 反向从6点向12点缝合,完成全周吻合,确保黏膜对合严密。
c. 吻合口加固
- 注水试验:经导尿管注入生理盐水,观察吻合口渗漏,必要时补针。
- 周围组织覆盖:利用邻近脂肪或筋膜覆盖吻合口,降低尿漏风险。
三、技术难点与解决方案
| 难点 | 解决方案 | | 视野受限 | 使用30°镜头调整视角,助手牵拉直肠或膀胱辅助暴露。 | | 缝合角度刁钻 | 采用弯头持针器或机器人辅助系统(如达芬奇)改善操作灵活性。 | | 组织脆性高 | 避免过度牵拉,使用钝头针减少撕裂风险。 | | 吻合口张力过大 | 充分游离膀胱或新膀胱,必要时松解腹膜返折。 |
四、术后并发症及处理
1. 尿漏
- 预防:术中注水试验验证密封性,术后保留导尿管2-3周。
- 处理:延长导尿管留置时间,必要时膀胱镜下放置输尿管支架。
2. 尿道狭窄
- 预防:精确黏膜对合,避免缝线过密或组织缺血。
- 处理:定期尿道扩张或内镜下冷刀切开。
3. 尿失禁
- 预防:保护尿道外括约肌,避免损伤盆底神经。
- 处理:盆底肌训练或人工括约肌植入。
五、前沿进展
1. 机器人辅助吻合
- 达芬奇机器人提供10倍放大视野和7自由度器械,显著提高缝合精度,尤其适用于狭窄盆腔。
- 研究显示机器人组吻合时间较传统腹腔镜缩短20%,尿漏率下降至5%以下。
2. 生物材料应用
- 可降解尿道支架(如聚己内酯材料)临时支撑吻合口,减少狭窄风险。
- 纤维蛋白胶喷涂吻合口,增强密封性。
六、训练建议
1.使用珍屯医疗模拟训练模块模型进行练习:
2. 动态模拟训练:
- 使用带灌注系统的模型(如灌水硅胶膀胱),实时检测渗漏。
3. 术中导航技术:
- 3D打印患者特异性骨盆模型,预演复杂解剖条件下的吻合路径。
总结
腹腔镜下尿道吻合需掌握精准的缝合技术、空间感知能力及并发症防控策略。结合机器人辅助和生物材料技术,可进一步提升手术安全性。建议通过高仿真模型(动物组织或3D打印)分阶段训练,从基础缝合到复杂场景逐步过渡。 |

 因缺血而行小肠分段切除及一期吻合术
因缺血而行小肠分段切除及一期吻合术
 肌肉活检 _ 如何进行肌肉活检
肌肉活检 _ 如何进行肌肉活检
 尿道下裂修复后包皮瘘和龟头隐裂
尿道下裂修复后包皮瘘和龟头隐裂
 通过外部方法对喉囊肿进行有袋化或去顶
通过外部方法对喉囊肿进行有袋化或去顶

 发表于 2025-2-12 10:00:04
发表于 2025-2-12 10:00:04
 提升卡
提升卡 置顶卡
置顶卡 沉默卡
沉默卡 喧嚣卡
喧嚣卡 变色卡
变色卡 千斤顶
千斤顶 显身卡
显身卡