马上注册,结交更多好友,享用更多功能,让你轻松玩转社区。
您需要 登录 才可以下载或查看,没有账号?注册
×
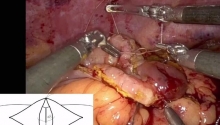
机器人 CMI 修复由精通机器人腹部手术的普通外科医生执行。患者仰卧,双臂放在身体两侧(图 1A)。骨突处用垫子垫好。然后以通常的无菌方式准备和覆盖腹部(图 1B)(视频 1)。da Vinci Systems(Intuitive,加利福尼亚州桑尼维尔)手术机器人定位在患者左侧。
图 1.
内窥镜收肌延长机器人腹壁修复:一种治疗核心肌肉损伤的微创方法

A) 患者仰卧,骨突处垫好垫子,双臂放在身体两侧。B) 以常规无菌方式准备和覆盖腹部,以进行机器人核心肌肉损伤修复手术。
准备和覆盖腹部后,患者被置于轻微的头低脚高体位。首先在Palmers点处建立左上腹入口,通过该入口插入 Veress(美敦力,明尼阿波利斯,明尼苏达州)针头,将腹部充气至 15 毫米汞柱。将 8.5 毫米机器人套管针插入Palmers点处的入口后,建立中线和右上腹入口,并在直接观察下插入 8.5 毫米机器人套管针(图 2A)。将解剖学(本例中为右侧)15 × 10 厘米 ProGrip 腹腔镜自固定网片(Medtronic,明尼阿波利斯,明尼苏达州)折叠成三分之一,并用无菌记号笔标记边界,以便在进入腹腔后帮助定位。在机器人对接之前,将网片和 180 天 2-0 V-Loc 伤口闭合倒钩缝合线(Medtronic,明尼阿波利斯,明尼苏达州)插入腹部。机器人从患者左侧进入无菌区,将摄像头连接到脐上入口的机械臂 #3,将双极抓取器连接到左侧入口的机械臂 #2,将热单极剪刀连接到右侧入口的机械臂 #4(图 2B)。
图 2.
内窥镜收肌延长机器人腹壁修复:一种治疗核心肌肉损伤的微创方法

A) 充气后,首先将套管针插入左上腹,然后在直视下插入中线和右上腹。B) 达芬奇手术机器人从患者左侧进入并停靠。
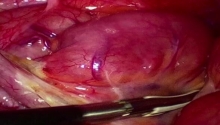
停靠后,手术继续在机器人控制台上进行。注意力转向腹部右侧。为了制作腹膜瓣,使用电灼器从脐正中韧带横向切开腹膜(图 3,A 和 B)。将腹膜前剥离至 Cooper 韧带水平,并进行识别。如果有直接缺损的证据,则减少缺损(图 3C)。识别精索结构,沿输精管和精索的圆周方向剥离腹膜(图 3D)。整个手术过程中,上腹部血管均受到保护。
图 3.
内窥镜收肌延长机器人腹壁修复:一种治疗核心肌肉损伤的微创方法

A) 从脐上入口处可以看到用电灼术切开腹膜。B) 结合电灼术和钝性解剖至 Coopers 韧带水平,创建腹膜瓣。C) 在上腹部血管内侧识别缺损。D) 识别精索并将其从腹膜圆周释放。
一旦对腹膜高位解剖满意,解剖 ProGrip 网片就会展开并适当定位,并具有良好的内侧覆盖(图 4)。对腹膜瓣施加牵引力,以确认网片放置正确,并且腹膜解剖充分。当对腹膜瓣施加牵引力时,网片不应移动,如果观察到移动,则需要额外移动腹膜瓣。不使用固定钉。
图 4.
内窥镜收肌延长机器人腹壁修复:一种治疗核心肌肉损伤的微创方法

从脐上入口处观察,解剖学 ProGrip 网片适当地放置在右下腹壁缺损处,内侧覆盖良好。施加压力将网片固定在腹膜壁上。
用 2-0、180 天 V-Loc 闭合腹膜瓣(图 5A)。然后对腹部进行排气。用 0 Vicryl(Ethicon,新泽西州拉里坦)闭合脐周筋膜,用 3-0 Monocryl(Ethicon,新泽西州拉里坦)和手术皮肤胶闭合腹腔镜入口(图 5B)。使用无菌敷料。机器人 CMI 修复的技术优点和缺陷列于表 1。
图 5.
内窥镜收肌延长机器人腹壁修复:一种治疗核心肌肉损伤的微创方法

A) 从脐上入口,使用 180 天 2-0 V-Loc 闭合从外侧到内侧的腹膜瓣。在直接观察下取出腹腔镜器械和套管针。B) 闭合脐周筋膜,然后皮下闭合入口。
手术技术——收肌延长
取下机器人 CMI 修复部分的无菌布,将患者的下肢置于蛙式位置(图 6A),骨突处用垫子垫好。腹股沟以通常的无菌方式准备和覆盖(图 6B)。
图 6.
内窥镜收肌延长机器人腹壁修复:一种治疗核心肌肉损伤的微创方法

A) 机器人修复核心肌肉损伤后,患者重新定位以进行收肌延长,保持仰卧位,下肢置于蛙式姿势。B) 以通常的无菌方式准备和覆盖右腹股沟区域。
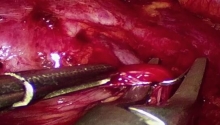
触诊收肌腱,并将局部麻醉剂注入切口的计划位置。在腹股沟处制作两个入口,与收肌腱对齐,特别注意避开神经血管结构,例如闭孔神经。远端腹股沟入口距离腹股沟皱褶 4 指宽,采用钝性解剖。然后放置内窥镜,在直接观察下,使用脊椎针定位直接腹股沟入口,该入口尽可能靠近腹股沟皱褶,覆盖收肌腱(图 7)。
图 7.
内窥镜收肌延长机器人腹壁修复:一种治疗核心肌肉损伤的微创方法

局部麻醉浸润后,在距右腹股沟皱褶 4 指宽处建立远端腹股沟入口,并放置无套管内窥镜。在直接观察下,在右腹股沟皱褶远端建立第二个直腹股沟入口。两个入口均覆盖触诊的收肌腱。将射频设备放置在直接腹股沟入口中。
将 VAPR 棒(DePuy Mitek, Inc.,马萨诸塞州雷纳姆)放置在没有套管的直接腹股沟入口中。识别出收肌长肌腱的红斑、肌腱病和挛缩(图 8A)。进行滑囊切除术,并用 VAPR 棒打开发炎的筋膜(图 8B)。使用电灼止血。
图 8.
内窥镜收肌延长机器人腹壁修复:一种治疗核心肌肉损伤的微创方法

从远端腹股沟入口可以看到右收肌腱。A) 观察切除的滑囊炎和腱鞘。B) 然后用 VAPR 棒打开腱鞘。
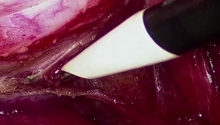
打开收肌长肌腱筋膜并在内侧和外侧勾画出肌腱后(图 9A),用 VAPR 棒进行 Z 形延长。尽可能靠近近端,取 50% 的肌腱(图 9B),从内侧到外侧。小心避开闭孔神经。
图 9.
内窥镜收肌延长机器人腹壁修复:一种治疗核心肌肉损伤的微创方法

A) 继续从远端腹股沟入口观察右收肌腱,并使用 VAPR 棒实现肌腱的筋膜开口和轮廓勾画。B) 最靠近近端工作,50% 的收肌腱从内侧到外侧释放。
使用 EXPRESSEW AutoCapture + 缝合器(Depuy Synthes,马萨诸塞州雷纳姆)将 #1 Vicryl 缝合线穿过释放的远端肢体(图 10A)。将缝合线向远端延伸 1.5 厘米,缝合到剩余健康肌腱的肢体上(图 10B)。使用关节镜打结器将其打结,并将尾部剪至适当长度。
图 10.
内窥镜收肌延长机器人腹壁修复:一种治疗核心肌肉损伤的微创方法

EXPRESSEW AutoCapture + 缝线穿刺器放置在腹股沟直入口处。A) 缝线穿过现已部分释放的右收肌腱远端肢体的内侧部分。B) 然后将缝线向远端延伸 1.5 厘米,然后穿过剩余的健康肌腱并用关节镜打结器打结。
再次使用 VAPR 棒从内侧向外侧工作,释放剩余的 50% 近端肢体以完成延长。远端和近端释放的肌腱保持缝合状态。对无活力组织进行清创(图 11)。
图 11.
内窥镜收肌延长机器人腹壁修复:一种治疗核心肌肉损伤的微创方法

A) VAPR 棒从直接腹股沟入口开始工作,位于右收肌腱的中央部分(虚线),就在缝合线的远端。B) 从肌腱中心开始释放剩余的 50% 肌腱,并向侧面工作。C) 然后进行任何必要的清创。
用轻柔的压力从手术空间中去除液体。用 3-0 Monocryl 缝合线和手术皮肤胶关闭入口,并使用无菌敷料(图 12)。表 2 列出了收肌延长的技术亮点和陷阱。
图 12.
内窥镜收肌延长机器人腹壁修复:一种治疗核心肌肉损伤的微创方法

取出内窥镜和 VAPR 杆后,在缝合皮肤之前,用轻柔的压力挤出手术空间中因手术而产生的多余液体。 | 
 因缺血而行小肠分段切除及一期吻合术
因缺血而行小肠分段切除及一期吻合术
 肌肉活检 _ 如何进行肌肉活检
肌肉活检 _ 如何进行肌肉活检
 尿道下裂修复后包皮瘘和龟头隐裂
尿道下裂修复后包皮瘘和龟头隐裂
 通过外部方法对喉囊肿进行有袋化或去顶
通过外部方法对喉囊肿进行有袋化或去顶

 发表于 2025-1-6 10:00:00
发表于 2025-1-6 10:00:00
 提升卡
提升卡 置顶卡
置顶卡 沉默卡
沉默卡 喧嚣卡
喧嚣卡 变色卡
变色卡 千斤顶
千斤顶 显身卡
显身卡 楼主
楼主