这是一名 71 岁女性患者的病例,患有结直肠癌和肝转移。患者之前曾接受过开腹结肠次全切除术,以治疗位于狭窄降结肠的腺癌引起的肠阻塞。在肝段 VII、VIII、IV、VI 和 V 中发现了六个疑似继发性肝病变。
在接受 7 个周期的辅助化疗后,磁共振成像 (MRI) 显示肝病变进展。因此,建议对患者进行机器人扩大右肝切除术,采用肝内外 Glissonian 法。
这种手术技术可以精确控制肝脏血液供应,最大限度地降低出血和其他手术并发症的风险。此外,它还可以改善胆管的可视化,有助于准确识别和保留胆道结构。外 Glissonian 法很复杂,需要专门的培训和专业知识。然而,它可以改善接受右肝切除术的患者的预后。
肝脏第 7 段 (S7) 的解剖性切除术由于难以接近而具有技术难度。本文,作者介绍了使用盐水连接烧灼剪刀 (SLiC-Scissors) 技术进行机器人肝脏解剖性 S7 分段切除术的经验。右叶完全游离后,使用 SLiC-Scissors 方法安全地进行 S7 的 Glissonean 蒂和肝静脉分支的解剖以及肝实质横断。尽管技术复杂,但使用 SLiC 剪刀方法进行机器人肝脏解剖性 S7 分段切除术的肝内 Glissonean 法安全且有效。
由于其可及性有限且解剖位置靠近右肝静脉 (RHV),解剖性肝段 7 (S7) 切除在技术上很困难。在开放手术和腹腔镜手术中,已经记录了一些采用肝内 Glissonean 入路的解剖性 S7 肝切除术的方法。然而,由于腹腔镜手术的固有局限性,例如难以正确暴露手术视野和设备程度有限,腹腔镜解剖性 S7 肝切除术似乎很复杂。
近年来,机器人肝切除术 (RLR) 得到了广泛的认可和更广泛的应用。与传统腹腔镜相比,RLR 具有许多优势,例如具有七个自由度的工具、稳定的三维视觉和震颤过滤。尽管如此,由于缺乏设备,肝实质横断面是 RLR 最困难的步骤之一。最近的一篇文章描述了 RLR 中盐水连接烧灼剪刀 (SLiC-Scissors) 方法的独特技术。该方法允许在 RLR 期间同时止血和快速肝实质解剖。
本文描述了一例使用 SLiC-Scissors 方法通过肝内 Glissonean 入路进行 S7 腹腔镜解剖性肝切除术的病例。
一名 67 岁的男性患者被诊断患有肝细胞癌,并被转诊到作者科室进行进一步检查和治疗。术前影像学证实 S7 中存在最大直径为 25 毫米的肿瘤(图 1,视频 1)。肝功能储备显示功能正常,Child-Pugh 1 级(评分 5),吲哚菁绿 (ICG) 在 15 分钟时的滞留率为 7.1%。对于外科手术,计划通过肝内 Glissonean 入路进行机器人解剖 S7 肝脏分段切除术。
图 1.

A-D为增强CT表现(箭头指向肿瘤);(A、B)增强早期图像,(C、D)增强晚期图像。
肿瘤位于第7节,最大直径为25毫米。
视频 1. 增强 CT 的 3D 结构术前图像。
Download video file (802.9KB, mp4)
肿瘤位于第 7 段,与 S7(V7)的主要静脉分支相邻。
患者体位和端口放置
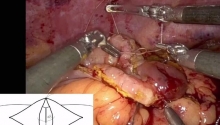
患者取侧卧位,左后倾,头部抬高 8-10 度。使用屈曲手术台,腹部右侧伸展并固定。第一个套管针通过脐顶部切口插入,腹内压保持在 8-10 mmHg。手术使用 da Vinci® Xi 手术系统(Intuitive Surgical, Inc.,加利福尼亚州桑尼维尔)。机器人端口1置于腹部右上外侧,3置于脐前侧,2和12mm辅助端口置于1和3之间,4置于左侧上腹部(图2)。在患者的右前侧,将患者推车推入并放下。
图 2.

手术通常使用五个套管针;机器人端口 1 放置在腹部右上外侧,端口 3 放置在脐上方,端口 2 和一个 12 毫米辅助端口放置在 1 和 3 之间,端口 4 放置在左侧上腹部。将病人推车推入并放置在病人的右颅侧。第一助理外科医生站在病人的右侧,而第二助理外科医生站在左侧。
T:目标肝叶;A:为助理外科医生准备的 12 毫米套管针;1、2、3、4:四个机器人端口;P:Pringle 操作点
在 RLR 中完全操作右肝
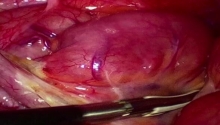
当肝脏被操作时,使用双双极方法,并通过相机的端口跳跃来固定手术区域(图 3,视频 2)。 1、2、3 和 4 号机器人端口主要分别用于肝脏牵拉(第三臂)、外科医生的左手、内窥镜和右手。1、2 和 4 号臂分别使用 Tip-up Forceps®、Fenestrated Bipolar Forceps® 和 Maryland Bipolar Forceps® 进行操作。在放置用于 Pringle 操作的腹膜外止血带系统并用腹腔镜凝固剪(LCS;Ethicon,俄亥俄州辛辛那提)密封和切断圆韧带后,解剖镰状韧带和右冠状韧带。解剖持续进行,直到右三角韧带被切断(图 3A)。
图 3.

(A) 腹腔镜电凝剪切断圆韧带后,用双极法解剖镰状韧带和右冠状韧带。(B) 从腹膜后游离肝脏。(C) 在右肾上腺和肝脏之间进行解剖,并夹住和切断右肾上腺静脉。(D) 右肝完全游离后,通过术中超声识别 S7 中的 Glissonean 蒂、S7 中的静脉分支和肝肿瘤并进行标记。
视频 2. 机器人解剖 S7 肝切除术中右肝完全游离的过程。
Download video file (9.9MB, mp4)
随后,将肝脏从腹膜后移出,暴露下腔静脉。在此步骤中,摄像头从端口 3 跳到端口 2,以直接观察手术区域,将 Fenestrated Bipolar Forceps®、Maryland Bipolar Forceps® 和 Tip-up Forceps® 分别放置在端口 1、3 和 4 中。使用 Tip-up Forceps® 牵拉肝脏以稳定手术区域,并在肝脏和腹膜后之间进行解剖(图 3B)。在解剖过程中,右肾上腺静脉被夹住并切断(图 3C)。在右肝完全移位后,通过术中超声识别并标记 S7(G7)中的 Glissonean 蒂、S7(V7)中的静脉分支和肝肿瘤(图 3D)。
使用 SLiC-Scissors 方法对 RLR 中的肝实质进行横断
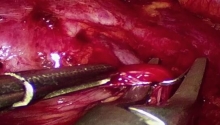
在对 RLR 中的肝实质进行横断时,使用了 SLiC-Scissors 法(图 4,视频 3)。简而言之,将相机放置在 2 号端口中,将 EndoWrist Suction Irrigator®(Intuitive Surgical,Inc.)和单极弯剪刀分别放置在 1 号和 3 号端口中。使用单极剪刀推进实质横断,同时通过从助手侧滴下盐水滴对解剖表面的浅层进行低温热凝止血。直径大于 2 毫米的血管结构由机器人或助手外科医生利用 LCS 进行夹持、结扎和分离。
图 4.

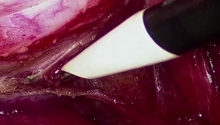
(A) 用水刀切开 G7 根部。(B) 结扎并夹住 G7。(C) 通过术中 ICG 负染色确认 S7 的清晰分界线。(D) 暴露、夹住并切断 V7。(E) 使用机器人 Firefly 系统的 ICG 成像适当地校正切割平面的位移。(F) 将 RHV 从头侧暴露到尾侧后,肝实质横切完成。
SLiC-Scissors:盐水连接电灼剪刀,S7:肝脏第 7 段,G7:S7 中的 Glissonean 蒂,ICG:吲哚菁绿,V7:S7 中的静脉分支,RHV:右肝静脉
视频 3. 使用 SLiC-Scissors 方法进行机器人解剖 S7 肝切除术中的肝实质横断。
Download video file (23MB, mp4)
SLiC-Scissors:盐水连接电灼剪刀
使用 SLiC-Scissors 法,对 G7 附近的肝实质进行横断,并使用水射流手术刀(Erbejet® 2,Erbe Elektromedizin GmbH,德国图宾根)解剖 G7 根部,结扎并夹住(图 4A、4B)。随后,S7 区域缺血,并观察到清晰的分界线,这通过术中 ICG 负染色得到证实(图 4C)。还检测到术前 ICG 给药的肿瘤染色。
随后,进行实质横断以暴露 V7 和 RHV,并环绕、夹住并切断 V7(图 4D)。在 G7 周围进行足够的实质横断后,用 LCS 切断 G7。使用机器人 Firefly 系统的 ICG 成像适当校正切面位移(图 4E)。将 RHV 从头侧暴露至尾侧以控制 RHV 直接出血后,完成肝实质横断(图 4F)。
根据需要进行 Pringle 操作,并在肝横断完成前两次(30 分钟)中断血流。总手术时间和对接时间分别为 367 分钟和 267 分钟,总失血量极少,无需术中输血。术后过程顺利,患者于术后第 7 天出院。
讨论
本文介绍了使用 SLiC-Scissors 法进行机器人肝脏 S7 分段切除术的肝内 Glissonean 入路。使用此策略,可以在 RLR 期间实现 G7 和 RHV 周围快速且安全的解剖。此外,这样做不会增加因热损伤而导致右后部胆汁泄漏或胆管狭窄的风险。因此,当前方法可以为 RLR 提供一种安全且省时的方法。
根据现有数据,RLR 的主要限制是肝实质的横断。最近,已经描述了一种利用 SLiC-Scissors 法进行机器人肝实质横断的新方法,该方法结合了现有腹腔镜和机器人手术器械的优点。目前的方法是基于京都大学式的开放性肝切除术中的肝实质横切术,其中通过盐水连接的双极电灼将低温热凝固(高达 100 摄氏度)应用于浅层。RLR 中的 SLiC-Scissors 法也利用单极电灼剪刀在辅助侧滴入盐水的情况下进行浅表低温热凝固。由于这种方法允许使用盐水保持剪刀尖端清洁,因此可以同时实现快速、薄层解剖和止血。
关于腹腔镜解剖性 S7 肝切除术的技术,已报道了各种方法,例如从肝门到 G7 的 Glissonean 法、肝内 Glissonean 法或尾状叶优先方法。然而,除了肝内 Glissonean 入路外,这些入路都需要在肝门和/或尾状叶周围进行额外的和不必要的解剖,并可能导致偶然的胆道并发症和出血。
对于采用机器人入路进行解剖性 S7 肝切除术的情况,RLR 的缺点包括触觉丧失以及因无意移动而损伤重要血管和实质的风险。因此,作者引入了肝内 Glissonean 入路,以避免在肝门和/或尾状叶周围进行额外的解剖。此外,当在 RLR 期间使用 SLiC-Scissors 法结合水射流手术刀时,可以更快、更舒适地接近主要 Glissonean 蒂和主要肝静脉周围的肝实质横断面。因此,作者认为使用 SLiC-Scissors 法的肝内 Glissonean 入路是机器人解剖 S7 肝分段切除术的首选技术之一。
一些论文表明,肋间端口对于腹腔镜入路肝脏后上部很有用。然而,所谓的 EndoWrist® 功能可以在 RLR 中使用,该功能可以在七个自由度上处理器械尖端。结合稳定的三维可视化和具有运动缩放能力的震颤过滤,机器人程序即使在不使用肋间端口的情况下进行解剖 S7 肝切除术,也可以舒适而准确地进行解剖。
结论
作者报告了机器人解剖 S7 肝分段切除术的经验。虽然机器人解剖 S7 分段切除术是一项技术要求很高的手术,但使用 SLiC-Scissors 法的肝内 Glissonean 入路是安全且实用的。这种方法可以对 S7 中的肝内 Glissonean 蒂和主要肝静脉进行细致的解剖和管理。 |

 因缺血而行小肠分段切除及一期吻合术
因缺血而行小肠分段切除及一期吻合术
 肌肉活检 _ 如何进行肌肉活检
肌肉活检 _ 如何进行肌肉活检
 尿道下裂修复后包皮瘘和龟头隐裂
尿道下裂修复后包皮瘘和龟头隐裂
 通过外部方法对喉囊肿进行有袋化或去顶
通过外部方法对喉囊肿进行有袋化或去顶

 发表于 2024-12-27 00:00:02
发表于 2024-12-27 00:00:02
 提升卡
提升卡 置顶卡
置顶卡 沉默卡
沉默卡 喧嚣卡
喧嚣卡 变色卡
变色卡 千斤顶
千斤顶 显身卡
显身卡 楼主
楼主