马上注册,结交更多好友,享用更多功能,让你轻松玩转社区。
您需要 登录 才可以下载或查看,没有账号?注册
×
腹壁修复 (AWR) 手术,特别是腹股沟疝修复,是全世界最常见的手术之一。在过去的几十年中,主要是近年来,新技术和解剖概念的出现增强了对 AWR 的理解。这表明需要增加手术量并在此领域进行更多更好的培训。
关于腹股沟疝的微创手术 (MIS),最常见的两种方法是经腹部腹膜前 (TAPP) 修复,然后是完全腹膜外 (TEP) 修复,与开放式修复相比,它具有多种优势。然而,由于手术的复杂性以及大多数外科医生(尤其是住院医生)对后 (内窥镜) 腹股沟解剖学知识有限等多种因素,限制了它们的广泛应用。一旦这些挑战得到解决,MIS 疗法很可能被视为治疗这些疝气的黄金标准,因为它比开放式疗法有优势,而且腹股沟疝发病率很高。
机器人手术,尤其是在美国,正在不断发展。机器人腹壁手术 (rAWS) 在文献中的报告病例有所增加,在术后并发症和复发率方面,其结果与其他微创方法相当。首例机器人疝修补术于 2007 年被描述,从那时起,rAWS 增加了好几倍。Sheetz 等人报告称,在短短 6.5 年内,机器人腹股沟疝修补术的比例从 0.7% 增加到 28.8%(变化了 41.1 倍),机器人腹侧疝修补术的比例从 0.5 增加到 22.4%(变化了 44.8 倍)。Muysoms 认为机器人腹股沟疝修补术,特别是机器人 TAPP(rTAPP),是 AWR 外科医生培训的重要初始程序,可用于学习和训练解剖、缝合和网片处理。
随着机器人使用量的不断增长,对培训和认证的需求也在增加,尤其是随着新系统进入市场。与其他领域一样,模拟起着重要作用,然而,在机器人手术领域,基于模拟的课程更为重要,因为机器人平台的使用有限、培训机会较少、成本高以及与湿实验室课程相关的后勤挑战。模拟模型通常很昂贵,开发具有成本效益的模拟器、评估其表面、内容和结构有效性以及教育影响非常重要。
在 AWR 领域,描述了 21 种腹腔镜疝修补模型,但只有 4 种腹腔镜腹股沟疝 TAPP 修补模型。总体而言,这些作者得出结论,只有少数模型显示出完全的有效性和教育影响力。其中一些模型似乎构建起来很复杂,对经验丰富的外科医生的吸引力有限。它们中的大多数缺乏结构有效性;没有表现出与真实解剖/程序相似的特征;只有一个展示了技能从模拟到手术室的转移。这些问题是模拟模型反复面临的问题,尝试模拟整个过程通常是不可能的。
因此,建议将过程分解为一些核心步骤。关于 TAPP 腹股沟修复,2017 年,Daes 和 Felix 描述了“肌腹股沟孔 (MPO) 的批判性视图”,两年后,Furtado 等人根据新的解剖概念系统化了该程序。他们根据腹股沟解剖标志的关系理想化了一个倒 Y 形,并描述了 MPO 内的 5 个三角形和 3 个解剖区。随后,在 2020 年,Claus 等人描述并系统化了掌握和以安全的方式执行 TAPP 疝修补术的规则。这些团体主张,一般来说,该程序的主要步骤是:1) 腹膜切口;2) 通过解剖腹膜前平面创建腹膜瓣; 3) 放置网片(带或不带固定);4) 使用可吸收或带倒钩的缝合线缝合腹膜。他们还强调,中央区域(区域 3)的解剖是最艰难的步骤,需要仔细解剖以避免错误和损伤髂血管或索等关键结构。考虑到外科手术培训的需求和挑战,特别是机器人手术、腹股沟后部解剖的难度以及实现预期安全性和结果的标准化需求,开发了一种低成本硅胶模型,可以模拟 MPO 的关键视图并遵守安全 TAPP 修复的黄金法则。
材料和方法
参与者
本研究在葡萄牙外科住院医师和专家中进行,旨在评估一种新的 MIS TAPP 腹股沟疝修补模拟模型。25 名没有机器人手术或腹股沟 TAPP 修复经验的参与者完成了整个培训计划,并在课程期间和结束时接受了评估。
研究设计
本研究是一项前瞻性观察性研究,基于对机器人经腹腹膜前 (rTAPP) 腹股沟疝修补新模拟模型的绩效评估和意见/观点。该研究是在 2023 年 4 月在贝拉内陆大学 CUBI 外科模拟中心举行的“机器人手术入门课程”期间进行的。课程注册是先到先得的免费课程,研究团队无需主动选择参与者。
首先,参与者需要通过网站完成一份在线问卷,内容包括他们的人口统计信息和腹腔镜技能的自我评估。所有参与者均同意参加课程和研究。然后,他们被指导了手术步骤,包括定义的目标和小/大错误标准。之后,参与者使用 DaVinci Xi® 系统上的新硅胶模型模拟了 rTAPP 腹股沟疝修补术。课程结束后,他们被要求自愿匿名回答保真度问卷。
统计
根据特定于模型的评估量表对执行和错误域以及完整程序进行评分。收集了保真度问卷结果。所有统计分析均使用 IBM® SPSS Statistics 28 for MacOS® 软件执行。在计算描述性统计数据后,检查了大三和大四学生在每个领域获得的分数(分数)的差异,并在检查了分布的正态性和方差的同质性后,对整个程序运行了独立样本 t 检验。为了确保保真度,计算了总问卷(14 个问题)、表面效度相关问题(Q3-4 和 Q13-14)、内容效度相关问题(Q5-8 和 Q12)以及 DaVinci Xi® 系统中的机器人训练模型效用(Q1-2 和 Q9-10)的平均值和标准差以及 Cronbach α。
模型设计
的模型代表了右侧腹股沟解剖的后视图。基于 Furtado 等人提出的“倒 Y + 5 个三角形概念”,它包括 4 个关键解剖标志和 2 个代表与图 1 所述相同概念的结构。
图. 1.
验证TAPP 腹股沟疝修补术的新型硅胶模型

左图——Furtado 等人的原始图,其中表示了 5 个三角形、“倒 Y”元素和腹股沟韧带。右图——模型中表示的 5 个三角形,其中表示的元素与原始报告相同
模型制作
模型完全是手工制作的,根据其上表示的解剖元素,使用不同类型的硅胶和混合物,颜色不同。为了创建模型,首先设计并制作了不同元素的模具。
这些元素构成了模型的 3 个层:
第 1 层 — “结构 1” — 腹壁/腹横筋膜 — 由硅胶“A” + 颜料(粉色/黄色/棕色混合物)制成
第 2 层 — “4 个解剖标志” — 上腹血管、输精管、精索血管、腹股沟韧带 — 由硅胶“B” + 颜料(红色、皮肤色、蓝色和白色)制成
第 3 层 — “结构 2” — 腹膜 — 纺织网和硅胶“A” + “B” + 颜料(白色)
第 2 层的元素按照倒 Y 概念放置在第 1 层上,并根据 MPO 的后部解剖结构放置,从而形成所描述的 5 个三角形。最后将第 3 层放置在另外两层之上,固化后,将硅胶模型固定在丙烯酸激光切割结构上,该结构旨在支撑硅胶模型,从而创建一个 17 × 11.5 厘米的“窗口”,代表 MPO,从而指示应解剖的区域以进行适当的网格放置图 2。
图. 2.
验证TAPP 腹股沟疝修补术的新型硅胶模型

最终模型 + 结构为 MPO 解剖创建窗口
生产包括三个阶段,每个模型生产的总时间约为 4 小时,包括固化硅胶的时间。该模型是一次性使用的,估计成本为 40 欧元/模型。
培训计划
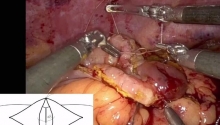
对于此模拟,所有参与者都扮演 DaVinci Xi® 系统上的控制台外科医生的角色。在每个会话开始时,将模型 + 结构放置在 DaVinci® 内镜训练器/盒子上,并将机器人停靠 - 图 3 以模仿后腹股沟区域的角度进行 TAPP 修复图 4。
图. 3.
验证TAPP 腹股沟疝修补术的新型硅胶模型

DaVinci Xi® 在模拟过程中停靠(图像中参与者开始关闭腹膜 - 步骤 4)
图. 4.
验证TAPP 腹股沟疝修补术的新型硅胶模型

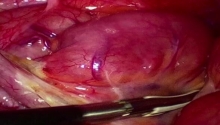
DaVinci Xi® 内镜训练器/盒子内的模型可视化(如图 4 所示,参与者开始关闭腹膜 - 步骤 4)
采用了与团队之前描述的相同的训练计划。经过验证的机器人手术培训计划介绍包括两部分:课程 #1 - 在 DaVinci® 模拟器控制台上进行虚拟练习(1 小时);课程 #2 - 使用 DaVinci Xi® 机器人系统进行解剖模型模拟(1 小时)。课程 #1 结束后,导师/观察员直接在系统监视器上指出解剖标志;解释 rTAPP 腹股沟疝修补手术的步骤和良好原则;列举模拟的目标;并解释哪些被认为是小错误和大错误,应避免执行安全和高质量的程序图 5、6 和 7;对于此模拟,机器人的 3 个手臂与 4 个仪器一起使用,手臂 1 - 抓取器;臂 2 — 相机;臂 3 — 剪刀/针架 — 表 1。
图. 5.
验证TAPP 腹股沟疝修补术的新型硅胶模型

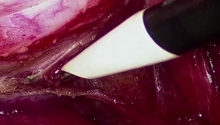
腹膜撕裂-轻微错误
图. 6.
验证TAPP 腹股沟疝修补术的新型硅胶模型

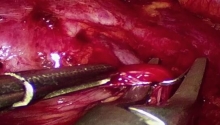
1) 基准;2) 索成分轻微损伤(轻微错误);3) 索成分和动脉严重损伤(严重错误)
图. 7.
验证TAPP 腹股沟疝修补术的新型硅胶模型

腹壁损伤(重大错误)
程序步骤
与现实生活中一样,模拟从使用剪刀切开腹膜开始(步骤 1)。此后,使用抓取器和剪刀解剖腹膜前空间(步骤 2)。应特别注意用左臂充分牵引“腹膜组织”,以促进皮瓣的形成和索元素的个性化。用右臂进行解剖和切割应小心而精确地进行,以尽量减少错误。一旦空间完全解剖,就放置一个网片,确保它平放在腹壁上并完全覆盖 MPO(步骤 3)。在本研究中,使用了 15 × 10 cms Progrip® 网片。最后,用连续缝合线缝合腹膜(步骤 4)。在 60 分钟的模拟中,观察者分析了每个模型,对其进行拍照并根据评估量表对其进行评估图 8 视频(补充文件)。
图. 8.
验证TAPP 腹股沟疝修补术的新型硅胶模型

模拟前后模型
保真度问卷
基于 Rehmann 等人和 LeBlanc 等人的研究成果,开发了一份专门针对该模型和训练计划的新问卷。选择了 14 个问题/陈述来评估环境、设备和心理领域,从而评估新 TAPP 模型的表面和内容效度,基于五点李克特量表(1-非常不同意;2-不同意;3-既不同意也不反对;4-同意;5-非常同意)表 2。
表 2。
保真度问卷
保真度-环境
Q.1 在机器人系统中使用腹股沟 TAPP 模型没有问题
Q.2 该 TAPP 模型适合与达芬奇机器人系统一起使用
Q.3 腹股沟解剖结构的视觉表现对于手术来说足够逼真
Q.4 Fruchaut 肌耻骨口尺寸的视觉表现对于该手术的执行很重要(17 × 11.5 厘米面积)
保真度-设备
Q.5 该模型允许模拟腹膜切开术(不谈论Q.6 该模型可以模拟腹膜前间隙解剖(不谈难度)
Q.7 该模型可以模拟网片的放置(不谈难度)
Q.8 该模型可以模拟腹膜闭合(不谈难度)
逼真度-心理
Q.9 我感觉进行模拟很舒服
Q.10 我觉得在模拟过程中我的所有感官都参与其中了
Q.11 我周围的事件和环境让我感觉自己实际上是在做手术
Q.12 总的来说,在进行这种模拟时,感觉自己实际上是在做这种外科手术
Q.13 这项练习让我感觉自己实际上是在进行真正的腹股沟疝修补术
Q.14 模型的视觉方面让我感觉好像我真的在进行 TAPP 修复
结果
25 名参与者(n = 25),19 名女性(n = 19)和 6 名男性(n = 6) 完成了整个培训计划。由于所有参与者都没有 TAPP 修复和机器人手术经验,因此根据课程前对普通外科和腹腔镜手术经验的自我评估问卷将样本分为 2 组(初级和高级)。表 3 列出了参与者的特征。
图. 9.

青少年与专家之间的分数差异:“总体程序”。
图. 10.

初级员工与专家的得分差异:“执行力 = 步骤”
图. 11.

初级人员与专家之间的得分差异:“质量 = 错误。”
讨论
最近,欧洲专科医生联盟 (UEMS) 与欧洲疝气学会 (EHS) 合作,将腹壁手术认定为一个专科,这主要是因为人们对疝气的临床和社区影响、腹壁解剖的复杂性、疝修补新程序和材料的开发和描述有了更多的认识。目前,尚未确定达到 TAPP 修补熟练程度的最低手术次数,尽管一些团体认为 50-100 个手术是 TAPP 学习曲线的最低次数。
毫无疑问,需要开发新的培训机会和模拟模型,以便确定更现实的数字,并在可能的情况下降低 TAPP 的学习曲线,而欧洲外科委员会-腹壁外科 (FEBS-AWS) 的 UEMS/EHS 研究金认证可能发挥重要作用。另一方面,培训和手术能力也面临着真正的挑战,例如工作法规、法律和道德问题,以及缺乏监考和模拟机会。
结论
特定的培训和评估是提高手术能力、将技能转移到手术室以及最终获得更好的手术结果的关键。这项研究使能够验证的 rTAPP 模型作为 TAPP 学习、实践和评估的有用工具。它可能对新手住院医生学习 TAPP 疝修补术以及缩短高级住院医生和普通外科医生的学习曲线起着重要作用。此外,它似乎是受训者和培训师评估和跟踪其进步的宝贵工具,它可能被外科协会采用或整合到机器人手术计划中,用于疝教育和认证。这些发现为模型和教育计划以及针对特定程序的技能评估的新工具的设计开辟了新的发展方向。
Download video file (14.5MB, mov)
Supplementary material 1 (MOV 14,811 kb)
参考资料:
1.Morales-Conde S, Balla A, Navarro-Morales L, Moreno-Suero F, Licardie E. ¿Es preferible el TAPP por vía laparoscópica para el tratamiento de la hernia inguinal? Técnica, indicaciones y expectativas de futuro. Cir Esp. 2023;101:S11–S18. doi: 10.1016/j.ciresp.2023.01.003. [DOI]
2.Simons MP, Aufenacker T, Bay-Nielsen M, Bouillot JL, Campanelli G, Conze J, et al. European Hernia Society Guidelines on the treatment of inguinal hernia in adult patients. Hernia. 2009;13:343–403. doi: 10.1007/s10029-009-0529-7. [DOI]
3.International Guidelines for Groin Hernia Management Hernia. 2018;22(1):1–165. doi: 10.1007/s10029-017-1668-x. [DOI]
4.van Veenendaal N, Simons M, Hope W, Tumtavitikul S, Bonjer J, HerniaSurge G. Consensus on international guidelines for management of groin hernias. Surg Endosc. 2020;34:2359–2377. doi: 10.1007/s00464-020-07516-5. [DOI]
5.Furtado M, Claus CMP, Cavazzola LT, Malcher F, Bakonyi-Neto A, Saad-Hossne R. Systemization of laparoscopic inguinal hernia repair (tapp) based on a new anatomical concept: inverted y and five triangles. Arq Bras Cir Dig. 2019;32(1):e1426. doi: 10.1590/0102-672020180001e1426. [DOI]
6.Daes J, Felix E. Critical view of the myopectineal orifice. Ann Surg. 2017;266(1):e1–e2. doi: 10.1097/SLA.0000000000002104. [DOI]
7.Peña ME, Dreifuss NH, Schlottmann F, Sadava EE. Could long-term follow-up modify the outcomes after laparoscopic TAPP? A 5-year retrospective cohort study. Hernia. 2019;23(4):693–698. doi: 10.1007/s10029-019-01953-5. [DOI]
8.Dreifuss NH, Peña ME, Schlottmann F, Sadava EE. Long-term outcomes after bilateral transabdominal preperitoneal (TAPP) repair for asymptomatic contralateral inguinal hernia. Surg Endosc. 2021;35(2):626–630. doi: 10.1007/s00464-020-07425-7. [DOI]
9.Muysoms F. Robotic abdominal wall surgery: where is its most powerful potential? Cir Esp (Engl Ed) 2021;99(9):627–628. doi: 10.1016/j.ciresp.2021.01.015. [DOI]
10.Podolsky D, Novitsky Y. Robotic inguinal hernia repair. Surg Clin North Am. 2020;100(2):409–415. doi: 10.1016/j.suc.2019.12.010. [DOI]
11.Engan C, Engan M, Bonilla V, Dyer DC, Randall BR. Description of robotically assisted single-site transabdominal preperitoneal (RASS-TAPP) inguinal hernia repair and presentation of clinical outcomes. Hernia. 2015;19(3):423–428. doi: 10.1007/s10029-014-1311-z. [DOI]
12.Pirolla EH, Patriota GP, Pirolla FJC, Ribeiro FPG, Rodrigues MG, Ismail LR, et al. Inguinal repair via robotic assisted technique: literature review. Arq Bras Cir Dig. 2018;31(4):e1408. doi: 10.1590/0102-672020180001e1408. [DOI]
13.Aiolfi A, Cavalli M, Micheletto G, Lombardo F, Bonitta G, Morlacchi A, et al. Primary inguinal hernia: systematic review and Bayesian network meta-analysis comparing open, laparoscopic transabdominal preperitoneal, totally extraperitoneal, and robotic preperitoneal repair. Hernia. 2019;23(3):473–484. doi: 10.1007/s10029-019-01964-2. [DOI]
14.Finley DS, Rodriguez E, Jr, Ahlering TE. Combined inguinal hernia repair with prosthetic mesh during transperitoneal robot assisted laparoscopic radical prostatectomy: a 4-year experience. J Urol. 2007;178(4):1296–1300. doi: 10.1016/j.juro.2007.05.154. [DOI]
15.Vierstraete M, Simons M, Borch K, de Beaux A, East B, Reinpold W, et al. Description of the current Da Vinci® training pathway for robotic abdominal wall surgery by the European Hernia Society. J Abdom Wall Surg. 2022 doi: 10.3389/jaws.2022.10914. [DOI]
16.Sheetz KH, Claflin J, Dimick JB. Trends in the adoption of robotic surgery for common surgical procedures. JAMA Netw Open. 2020;3(1):e1918911. doi: 10.1001/jamanetworkopen.2019.18911. [DOI]
17.Sadava EE, Novitsky YW. Simulation in hernia surgery: where do we stand? J Laparoendosc Adv Surg Tech A. 2021;31(5):551–555. doi: 10.1089/lap.2021.0081. [DOI]
18.Pelly T, Vance-Daniel J, Linder C. Characteristics of laparoscopic and open hernia repair simulation models: a systematic review. Hernia. 2022;26(1):39–46. doi: 10.1007/s10029-021-02442-4. [DOI]
19.Birkmeyer JD, Finks JF, O'Reilly A, Oerline M, Carlin AM, Nunn AR, et al. Surgical skill and complication rates after bariatric surgery. N Engl J Med. 2013;369(15):1434–1442. doi: 10.1056/NEJMsa1300625. [DOI]
20.Claus C, Furtado M, Malcher F, Cavazzola LT, Felix E. Ten golden rules for a safe MIS inguinal hernia repair using a new anatomical concept as a guide. Surg Endosc. 2020;34:1458–1464. doi: 10.1007/s00464-020-07449-z. [DOI]
21.Gonçalves MR, Novo de Matos J, Oliveira A, Marinho R, Cadime I, Carlos Alves P, et al. Robotic4all project: results of a hands-on robotic surgery training program. Laparoscopic, Endoscopic and Robotic Surg. 2023;6(1):1–8. doi: 10.1016/j.lers.2023.01.002. [DOI]
22.Rehmann AJ (1995) A handbook of flight simulation fidelity required for human factors research. 10.21949/1403228
23.LeBlanc J, Hutchison C, Hu Y, Donnon T. Feasibility and fidelity of practising surgical fixation on a virtual ulna bone. Can J Surg. 2013;56(4):E91–E97. doi: 10.1503/cjs.010912. [DOI]
24.Köckerling F. What is the influence of simulation-based training courses, the learning curve, supervision, and surgeon volume on the outcome in hernia repair? A systematic review. Front Surg. 2018;5:57. doi: 10.3389/fsurg.2018.00057. [DOI]
25.Nazari T, Dankbaar MEW, Sanders DL, Anderegg MCJ, Wiggers T, Simons MP. Learning inguinal hernia repair? A survey of current practice and of preferred methods of surgical residents. Hernia. 2020;24:995–1002. doi: 10.1007/s10029-020-02270-y. [DOI]
26.Muysoms F, Nachtergaele F, Pletinckx P, Dewulf M. ROBotic Utility for Surgical Treatment of hernias (ROBUST hernia project) Cir Esp (Engl Ed) 2021;99(9):629–634. doi: 10.1016/j.ciresp.2021.01.016. [DOI]
27.Intuitive Surgical (2018) DaVinci training passport. https://www.intuitive.com/en-us/ ... hure-ww-1016750.pdf
28.Bjerrum F, Collins JW, Butterworth J, Slack M, Konge L. Competency assessment for the Versius surgical robot: a validity investigation study of a virtual reality simulator-based test. Surg Endosc. 2023 doi: 10.1007/s00464-023-10221-8. [DOI]
29.Schmidt MW, Köppinger KF, Fan C, Kowalewski KF, Schmidt LP, Vey J, et al. Virtual reality simulation in robot-assisted surgery: meta-analysis of skill transfer and predictability of skill. BJS Open. 2021 doi: 10.1093/bjsopen/zraa066. [DOI]
30.Vassiliou MC, Feldman LS, Andrew CG, Bergman S, Leffondré K, Stanbridge D, et al. A global assessment tool for evaluation of intraoperative laparoscopic skills. Am J Surg. 2005;190(1):107–113. doi: 10.1016/j.amjsurg.2005.04.004. [DOI]
31.Kurashima Y, Feldman LS, Al-Sabah S, Kaneva PA, Fried GM, Vassiliou MC. A tool for training and evaluation of laparoscopic inguinal hernia repair: the global operative assessment of laparoscopic skills-groin hernia (GOALS-GH) Am J Surg. 2011;201(1):54–61. doi: 10.1016/j.amjsurg.2010.09.006. [DOI]
PMCID: PMC10881695 PMID: 38110794 |

 因缺血而行小肠分段切除及一期吻合术
因缺血而行小肠分段切除及一期吻合术
 肌肉活检 _ 如何进行肌肉活检
肌肉活检 _ 如何进行肌肉活检
 尿道下裂修复后包皮瘘和龟头隐裂
尿道下裂修复后包皮瘘和龟头隐裂
 通过外部方法对喉囊肿进行有袋化或去顶
通过外部方法对喉囊肿进行有袋化或去顶

 发表于 2024-11-11 10:18:43
发表于 2024-11-11 10:18:43
 提升卡
提升卡 置顶卡
置顶卡 沉默卡
沉默卡 喧嚣卡
喧嚣卡 变色卡
变色卡 千斤顶
千斤顶 显身卡
显身卡