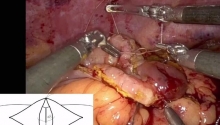
机器人辅助肾移植 (RAKT) 长期以来作为标准开放式肾移植 (OKT) 的微创替代方案,在活体捐赠者身上显示出可靠的结果,并且在已故捐赠者身上也取得了有希望的结果。 然而,RAKT 在接受者的髂血管存在动脉粥样硬化斑块的情况下仍然受到限制,这种斑块常见于老年患者和接受长期血液透析的患者。 与外科医生可以触诊动脉斑块的 OKT 不同,在微创手术中,触觉反馈缺失,导致血管夹紧和动脉切开术不安全。 为了克服这一限制,使用增强现实 (AR) 进行 3 维 (3D) 成像虚拟重建来在术中定位斑块,从而在 KT 的关键步骤中驱动外科医生。
研究是根据手术创新的IDEAL模型进行的。 3D 打印和虚拟模型是从高精度传统 CT 扫描成像中获得的,并在 RAKT 期间使用达芬奇控制台软件叠加在血管上。
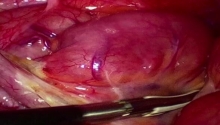
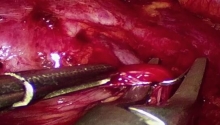
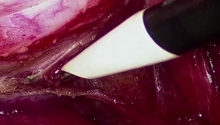
在 IDEAL 0 阶段,从有动脉斑块的患者获得 3D 虚拟模型,打印出来并通过手动触诊在 2 个 OKT 期间与患者的血管解剖结构进行比较。 在第一阶段,在组合开放式机器人 KT 和 2 RAKT 期间叠加无斑块患者的 3D 虚拟模型。 通过测量虚拟模型与真实血管并将其进行比较来评估解剖保真度。 然后,在血管夹紧和动脉切开阶段对没有斑块的临床病例使用 3D AR,以了解血管解剖过程中的解剖修改。 通过使用机器人超声 (US) 探头扫描 10 名接受机器人辅助前列腺癌髂淋巴结切除术的患者的髂动脉,测试了 3D 虚拟模型与斑块患者真实解剖结构的对应性。 最后,经过超声确认,3D-AR 使外科医生能够在有动脉斑块的临床病例中准确地放置夹子并安全地进行动脉切开术。
3D-AR 的使用克服了 RAKT 的主要局限性之一,为将其适应症扩展到晚期动脉粥样硬化血管疾病患者奠定了基础。 |

 因缺血而行小肠分段切除及一期吻合术
因缺血而行小肠分段切除及一期吻合术
 肌肉活检 _ 如何进行肌肉活检
肌肉活检 _ 如何进行肌肉活检
 尿道下裂修复后包皮瘘和龟头隐裂
尿道下裂修复后包皮瘘和龟头隐裂
 通过外部方法对喉囊肿进行有袋化或去顶
通过外部方法对喉囊肿进行有袋化或去顶

 发表于 2024-5-31 00:00:06
发表于 2024-5-31 00:00:06
 提升卡
提升卡 置顶卡
置顶卡 沉默卡
沉默卡 喧嚣卡
喧嚣卡 变色卡
变色卡 千斤顶
千斤顶 显身卡
显身卡 楼主
楼主