|
在全髋关节置换术(THA)中,植入物的准确定位是取得良好临床效果的关键。计算机辅助骨科手术 (CAOS) 已被开发用于在 THA 期间更准确地定位植入物。 CAOS 中的 THA 有被动、半主动和主动系统。导航是一种被动系统,仅向外科医生提供信息和指导。导航有 3 种类型:无图像导航、基于计算机断层扫描 (CT) 的导航和基于透视的导航。在无图像导航系统中,引入了一种无需配准骨盆前平面的配准新方法。基于 CT 的导航可以有效地用于骨盆平面参考,仰卧位的功能性骨盆平面可调整前骨盆平面的矢状倾斜度,以定位杯子方向。机器人辅助系统可以是主动的或半主动的。主动机器人系统按照术前编程执行种植体定位准备。它仅用于股骨植入体腔的制备。最近,另外开发了杯子定位程序。或者,为了便于外科医生接受,开发了半主动机器人系统。它最初仅用于杯子定位。然而,随着增强股骨工作流程的发展,该系统现在可用于定位杯和股骨柄。虽然计算机辅助 THA 取得了长足的进步,但由于学习曲线陡峭、术中技术问题、成本高等原因,目前仍存在争议。但是,在未来,CAOS 肯定会让外科医生能够操作随着技术的持续快速发展,更准确并导致 THA 的结果得到改善。 |

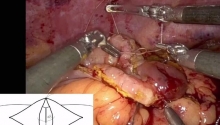
 因缺血而行小肠分段切除及一期吻合术
因缺血而行小肠分段切除及一期吻合术
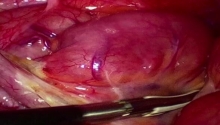
 肌肉活检 _ 如何进行肌肉活检
肌肉活检 _ 如何进行肌肉活检
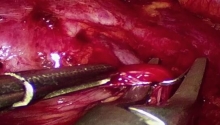
 尿道下裂修复后包皮瘘和龟头隐裂
尿道下裂修复后包皮瘘和龟头隐裂
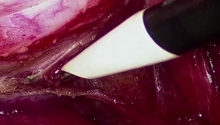
 通过外部方法对喉囊肿进行有袋化或去顶
通过外部方法对喉囊肿进行有袋化或去顶

 发表于 2022-7-20 00:00:13
发表于 2022-7-20 00:00:13
 提升卡
提升卡 置顶卡
置顶卡 沉默卡
沉默卡 喧嚣卡
喧嚣卡 变色卡
变色卡 千斤顶
千斤顶 显身卡
显身卡 楼主
楼主