马上注册,结交更多好友,享用更多功能,让你轻松玩转社区。
您需要 登录 才可以下载或查看,没有账号?注册
×
概要
机器人辅助甲状腺手术是内镜辅助手术后甲状腺手术进展的最新进展。优越的视野和机器人技术的技术进步的优点允许新颖的远程访问(经腋和耳后)手术方法。有趣的是,使用机器人手术系统和内窥镜技术的几个远程访问手术端口已经定制,以避免可见瘢痕的社会耻辱感。目前的文献在术后结果方面表现出各种优势;然而,相关的经济负担以及必要的额外培训和专业知识阻碍了其广泛应用于内分泌手术实践。这些方法提供了出色的美容效果,缩短了学习曲线,减少了通过机器人控制台以人体工程学方式操作的外科医生的不适感。本综述旨在提供为甲状腺切除术提供的各种远程访问技术的详细信息。虽然据报道这些是甲状腺手术的安全可行的方法,但仍然需要进一步评估其疗效。
关键词:机器人辅助,甲状腺切除术,耳后,经腋下,远程通路,美容甲状腺切除术
介绍
采用远程门诊甲状腺手术;特别是机器人辅助甲状腺切除术,近来已经普及。利用超声(US)和多普勒超声检查筛查甲状腺病变的进展导致甲状腺结节和甲状腺癌的检测增加,从而增加了甲状腺手术的数量。通常,开放性甲状腺切除术一直是治疗选择,然而,对于许多患者而言,可见的颈部瘢痕是不希望的。随着技术的进步,这些程序从常规甲状腺切除术转为视频辅助甲状腺切除术,最近转向机器人辅助治疗以获得更好的美容效果。视频辅助内镜下甲状腺切除术首先由Miccolli等人开创。 (1)。不久之后,Bellantone等人。报道了内窥镜下进行中央和侧向淋巴结清扫的安全性和可行性(1,2)。有几个关于甲状腺切除术的远程接入技术的报道,利用颈部以外的几个位置的手术端口,包括前胸壁,耳后枕区,腋窝区和锁骨下区。虽然它需要耐心和特别复杂的技能,但腋窝方法已被证明是最可行的方法之一。为了便于远程访问甲状腺手术,机器人技术在甲状腺手术中的应用出现,以克服与内窥镜远程访问甲状腺手术相关的一些技术挑战。
从那以后,许多外科医生在他们目前的实践中将他们的经验提升到机器人甲状腺手术。从2010年到2011年,这一转变标志着加30%(3)。目前在实践中看到的两种最常见的方法:(I)机器人辅助的经腋下; (II)使用Da Vinci Si手术系统(Intuitive Surgical,Sunnyvale,CA,USA)的后耳甲状腺切除术。在2000年代早期,使用经腋下切口实施无气道内镜甲状腺切除术(4)。然而,较旧的达芬奇机器人系统较重的机械臂使其难以在狭窄的工作空间中使用(4)。
甲状腺手术的不同微创方法
作者将这些不同的远程访问方法分为两类:(I)经颈/直接方法; (II)颈外/远程接入方法。
颈/直接入路
这些方法涉及在前颈部或外侧颈部放置小切口。钝性解剖用于创建手术空间,并且通过低压CO2吹入或通过外部皮肤收缩来维持。这些方法包括:
视频辅助中心入路,无气体或MIVAT(微创视频辅助甲状腺切除术)
胸骨切口上方的中央切口大小约为1英寸,可以直接进入甲状腺。强烈建议有两个辅助外科医生:一个用于收缩,另一个用于固定内窥镜。带状肌肉在中线处被识别和分离,然后用标准光学器件从甲状腺的前侧和外侧表面升高。然后利用小牵开器横向收缩带状肌肉,并在内侧收回甲状腺的上极。然后将5mm角度的内窥镜直接插入切口。在视频辅助控制下进行相关颈解剖结构的钝性解剖。沿着这些血管的长轴开始对上甲状血管蒂的轻柔解剖。为了释放甲状腺上极的内侧,使用谐波手术刀。如果存在锥形叶,则首先通过侧向入路释放,然后从其下舌下段进行释放。然后操作甲状腺的下部和侧部,并切断中间甲状腺静脉。然后将下甲状旁腺显现并横向解剖并维持其血管供应。然后通过颈切口提取甲状腺,并将浆果的峡部和韧带分开。
这种方法的主要优点是直接进入和小颈切口。已发表多篇文章报道手术疼痛较少,美容效果较好,住院时间较短,并且能够在门诊进行这些手术(1,5)。此外,一些外科医生认为这种方法的安全性和可行性适用于结节直径> 3 cm且体积> 30 mL的患者(6)。
侧内镜手术
使用SCM和颈动脉鞘横向之间的平面和带内侧的带状肌肉。需要提及的是,这种方法最适用于单侧病变和修复病例。
在此过程中使用三到四个端口,一个10毫米光学端口和两到三个操作端口。手术口位于病变侧胸锁乳突肌(SCM)肌肉的内侧边缘。这种方法允许直接进入甲状腺叶的后部。这消除了对带状肌肉的解剖的需要。 CO2吹入(~8 mmHg)用于维持工作空间。然后将上部血管蒂与谐波手术刀分开,识别喉神经(RLN)并沿其整个长度进行追踪。识别并保存上甲状旁腺和下甲状旁腺,然后分开下甲状腺血管。然后将浆果韧带分开,通过1.5cm切口取出标本,以便分割峡部。
前路内窥镜入路
这种方法允许双侧切除甲状腺,因为它利用了中线通路。这种方法使用四个套管网站点。第一种是5 mm光学套管针,它插在胸骨上切口的正上方。两个部位用于每个2毫米套管针,第四个部位用于5毫米套管针,所有这些部位都放置在SCM肌肉的上内侧边缘。使用超声波剪切机识别和解剖所有重要结构。然后通过超外侧套管针提取甲状腺。
颈外/远程接入方法
这些方法需要在颈部以外放置切口,需要在皮肤下进行广泛的解剖。然后通过专门设计的皮肤牵开器通过CO2吹入或外部收缩来维持操作空间。最近,机器人技术的应用进一步帮助外科医生完成这些技术,便于远程进入甲状腺手术,并有助于避免吹气的需要。机器人手术有几个优点,覆盖内窥镜方法,如高清三维摄像系统,更大的运动自由度,以及多关节无震颤内窥镜手臂,便于外科医生在有限的狭窄空间内更容易执行,有利于手术完整性。因此,这些方法的安全性和有效性使许多头颈外科医生能够通过高度改善的美容效果去除甲状腺(7-9)。尽管其在切除甲状腺病变方面取得了成功,但其经济负担和相关的术后并发症使得许多外科医生无法使用它。
手术机器人以这样的方式设计,即允许外科医生便于收回,手术视野,并提供两个手臂操作,同时仍保持牵引和反牵引。三个机器人仪器(马里兰解剖器,ProGrasp钳和谐波弯曲剪刀)用于使用双通道相机系统定向甲状腺组织。使用具有30度向下方向的内窥镜通过腋窝/后耳廓切口放置相机。电烙术,血管DeBakey钳和各种牵开器(直角和发光的乳房牵开器)用于创建和提升皮下皮瓣(表1,表2).2)。这导致更大的工作空间,允许外科医生以更好的视野操作。尽管新手外科医生的学习曲线显示出了出色的效果,但对于这种方法仍然具有重要经验仍然是必不可少的(10)。文献报道,在40-50例(11,12)之后,控制台时间显著缩短。
表格1
机器人辅助经腋窝入路所需的设备

NIM,神经完整性监测; SSEP,体感诱发电位。
表2
机器人辅助的耳后入路所需的设备

NIM,神经完整性监测。
没有可见的颈部瘢痕会吸引患者,特别是女性,选择远程进入手术。但是,在考虑远程访问方法时,必须仔细选择患者并进行适当的体检和筛查成像程序。应正确评估甲状腺结节的大小,位置,侧向性和转移性淋巴结的存在。应妥善解决患者对于获得良好瘢痕的偏好。位置,长度,设计和愈合评估手术的整体质量。表3概述了安全实施所需的各种指南(表3)。机器人辅助甲状腺切除术的理想候选者是(I)小的或平均的身体习惯(体重指数<30 kg / m2)年轻患者,有瘢痕疙瘩或肥厚性瘢痕形成史或不希望有明显的颈部瘢痕。保持选择标准至关重要,主要是在外科医生的学习曲线开始时。然而,作者小组报告了经腋窝入路的成功结果,60%的患者超重或肥胖,甲状腺结节大小为2.5 cm(7)。
表3
患者选择机器人甲状腺切除术

MIVAT,微创视频辅助甲状腺切除术; PTC,乳头状甲状腺癌。
经腋窝入路
患者定位
在全身麻醉下将患者仰卧,将手臂和肩膀放置在相同的垂直高度。颈部略微伸展。需要充分填充前臂和肘部以防止神经拉伸。使用NIM气管内插管(Medtronic Xomed,Jacksonville,FL,USA)进行插管以允许术中RLN监测(图1)。病变侧的手臂处于头部位置并在头部上方弯曲(改良的Ikeda的手臂位置)。在完全甲状腺切除术的情况下,将甲状腺较大叶的同侧臂定位于切口。应该注意的是,患有颈椎或肩部运动障碍的患者不适合这种方法。另外,使用躯体感觉诱发电位(SSEP)(Biotronic,Ann Arbor,MI,USA)常规监测中位神经和尺神经(图2)。 SSEP尚未被执行这些方法的外科医生普遍采用。相反,同侧手臂小心地定位并固定在手臂板上,以管理从腋窝到甲状腺床的最短距离。然而,在作者看来,这会增加解剖甲状腺床的距离。

图1
患者在全身麻醉下仰卧,并用NIM气管内插管。

图2
使用体感诱发电位(SSEP)常规监测尺骨和正中神经。
Chung及其同事描述了另一个手臂位置,将同侧手臂旋转至病灶至180度头部,填充,然后将其放置在板上。然而,这在西方人群中的许多患者中并未得到很好的接受。许多机器人外科医生通常在皮肤切口之前进行术中美国检查。这有助于定位甲状腺病变并检查解剖平面中周围结构与甲状腺的关系。
皮肤切口
在胸骨切口和腋窝之间绘制横向线以标记向后指向的切口的下限,以确保切口将被隐藏。图3显示了腋窝折叠处隐藏得很好的切口(图3)。从甲状舌骨膜到腋窝抽取60度斜线(图4)以确定切口的上限。渗入10mL的1%利多卡因和200,000肾上腺素中的1。做一个5-6厘米的垂直切口,与斜线和前腋线相交,作为上限。横线与前腋线的交点限定了其下限。应尽一切努力通过适当处理皮肤来减少瘢痕肥大。建议使用乳房折叠套管针为外科医生在学习过程中提供更简便的手术技巧。更新的机器人手术方法需要双切口技术。除此之外,在病变侧的乳房内侧褶皱中制作单个前胸部0.6-0.8cm的皮肤切口(13)。然后将套管针与其中一个停靠在套管上的机械臂一起使用,该机械臂有助于甲状腺的操作,收缩和解剖。

图3
术后经腋下切口。

图4
机器人经腋窝切口的标志。
在进行CO2吹入程序的情况下,将三个5mm切口放置在等距离的前腋线下方,或者对于12和5mm套管针进行一次30mm切口,除了第三个套管针(5mm)。 还已经使用在腋窝切口下方的第二切口来描述该方法的修改,用于放置第四臂以便缩回。 这种基于劣质的进入端口可以在以后用作手术引流管放置的位置。 这种修改允许更容易地放置第四臂而不产生可见的前胸壁切口; 特别适用于从两个切口转为单切口经腋窝入路的外科医生(14)。
创造一个工作空间
使用单极电烙术,准备皮下皮瓣用于解剖,以在胸大肌筋膜之前到锁骨之间形成子间隙平面。伤口保护器(来自Applied Medical,CA,USA的Alexis伤口牵开器系统)用于保护腋窝伤口边缘免受电灼伤或谐波手术刀的烧伤。牵开器用于使用延长尖端的bovie来保持对解剖区域的直接视觉。在锁骨识别后,SCM肌肉的2个头被解剖(图5),通过腋窝进入颈部中线的宽阔通道。对于在颈部周围有大型时尚垫的患者,例如在肥胖人群中,这可能是具有挑战性的。然后,指示助手将皮肤拉离隧道,以避免在皮肤中形成“纽扣孔”。当使用减轻的皮肤牵开器时,应在牵开器的深处和侧面进行解剖,从而将皮肤损伤的风险降至最低。工作空间由锁骨头限定在与甲状腺叶的上极相关的舌骨肌上方。通过SCM的胸骨头(内侧)和SCM的锁骨头(侧面)之间的小窗口接近胸骨甲状腺肌肉。甲状腺叶位于甲状腺肌肉下。解剖胸骨甲肌的最上部纤维以到达腺体的上极。然后,谐波手术刀在SCM的两个头之间产生足够的空间。使用Chung牵开器,带子肌肉向前抬起,形成暴露甲状腺前表面的工作空间(图6)。放置Chung牵开器后,麻醉师应确认颈部和肩部有足够的衬垫。根据外科医生的偏好,此时选择双切口技术。应该注意的是,在牵开器装置之后胸壁套管针的放置确认了胸腔牵开器在Chung牵开器下方的正确定位。相反,它会阻止胸腔牵开器进入Chung牵开器下方。

图5
皮下平面发展为胸大肌筋膜表面,并且识别SCM的头部(该平面可以使用电烙术或超声波谐波手术刀开发)。

图6
牵开器用于经腋窝入路。
对于CO2吹入,在开始急剧解剖以解剖颈阔肌和胸大肌之间的无血管平面之前,引入具有4-9mmHg压力的二氧化碳吹入的柔性腹腔镜。接下来,SCM肌肉和胸骨舌骨肌之间的平面被发展以提升甾体甲状腺肌肉并允许向前收缩,暴露同侧甲状腺。
对接阶段
在通过腋窝皮肤切口插入机器人臂后,Da Vinci模型Si机器人(Intuitive,Sunnyvale,CA,USA)停靠在手术区域的对侧。三个机器人手臂,30度向下看的内窥镜,谐波手术刀和马里兰钳,通过腋窝切口插入。谐波弯曲剪刀放置在机械臂中,对应于外科医生的主导臂。由于谐波手术刀不能提供运动自由度,因此它也可以在其他机械臂之间移动以改善可视化。最近引入了一种比谐波手术刀更大的血管封闭器,其具有萎缩的运动。有必要保持马里兰解剖器和谐波手术刀之间的距离,以避免两个机器人手臂之间可能发生碰撞的风险。然后将30度内窥镜以向下的视角放置在甲状腺床上。
手术切除甲状腺
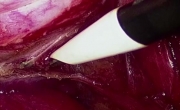
使用ProGrasp牵开器进行甲状腺的收缩(图7)。然后,使用Harmonic手术刀将甲状腺中段静脉分开。使用ProGrasp钳将甲状腺的上极柱拉入中下方,并使用Harmonic弯曲剪刀单独结扎上甲状血管。应特别注意结扎靠近甲状腺的所有血管,以避免对喉上神经外支造成伤害。从环咽和环甲肌(CTMs)中仔细并逐渐解剖甲状腺。继续解剖上极,直到上甲状旁腺暴露并释放。然后在气管食道沟中切除下甲状腺蒂附近的RLN以减少任何损伤解剖结构的风险。气管食道沟槽中的牵引可以便于在头部轻松识别RLN。为了确保神经的功能完整性,建议使用通过切口引入的RLN刺激器(Nerveana,Ventura,CA,USA)进行术中神经刺激(图8)。

图7
甲状腺使用ProGrasp钳向内侧缩回。

图8
鉴定气管食管沟中的喉返神经(RLN)。
通过密封甲状腺下动脉的分支,通过谐波手术刀实现止血。但是,在仪器启动前经过3-5秒是非常重要的,因为在激活过程中温度升高(80到100°C)可能会导致烧伤。在解剖腺体后,然后使用Harmonic手术刀分割峡部,并通过切口移除切除的甲状腺叶。对于手术治疗癌症的患者,切除的肺叶在内捕袋中取出,以避免肿瘤溢出。通过放置外科引流管以标准方式促进闭合。
机器人耳后甲状腺手术
后耳方法在几个方面优于经腋下方法,例如(I)更容易定位患者; (II)与甲状腺的距离较短,因此解剖较少,导致伤口愈合更快(15); (III)消除臂丛神经麻痹的风险; (IV)肥胖患者的皮瓣抬高更容易(4)。 Walvekar等人。首先描述了2010年在尸体模型中使用内窥镜辅助治疗后耳甲状腺切除术的可行性(16)。作者提到机器人技术的结合对这种方法有利。特里斯等人。首先报道了机器人技术在复古耳廓入路中的临床可行性和应用,并描述了2011年机器人整形甲状腺切除术的早期经验(17)。 Terris和Singer倾向于通过一系列经腋下方法对甲状腺进行优越至低级的治疗方法(18)。使用吹气技术,这种技术与腋窝入路相结合,进入甲状腺空间(19)。有趣的是,Terris的混合技术使得整形甲状旁切除术切口(19),Chung无气体机器人甲状腺切除术(20)与实施术中喉部神经监测成为可能。
患者定位
在全身麻醉下,患者以仰卧位置放在手术台上。 使用NIM气管导管尺寸6.0(Medtronic Xomed,Jacksonville,FL,USA)进行插管以允许术中RLN监测。
皮肤准备和切口
将耳后区域彻底刮干以将计划的切口线标记到毛发皮肤中。 然后将切口置于延伸至枕骨发际线的耳后皱褶中。 切口在完全静止的耳朵和头发遮盖的位置下降1厘米(图9)。

图9
耳垂后面的耳后标记,与枕骨发际线相邻。
创造一个工作空间
使用Metzenbaum剪刀创建颈阔肌浅表的皮下皮瓣并保留较大的耳神经(图10)。在平坦的平面上继续解剖到颈阔肌直到SCM肌肉的头部。识别SCM肌肉的两个头部(胸骨和锁骨头)之间的窗口,并使用谐波手术刀(Ethicon,Somerville,NJ)创建工作空间。皮带肌肉被识别并在内侧反射,以清楚地暴露甲状腺的上极。使用改良的Chung牵开器(Marina Medical,Sunrise,FL,USA)将手术袋放置在SCM肌肉的胸骨下方,同时继续解剖带状肌肉以允许暴露手术区域,并扩大进入甲状旁腺(图11)。创建皮下皮瓣大约需要30分钟。

图10
对于颈阔肌来说,皮瓣创造很浅薄。

图11
特殊牵开器置于胸锁乳突肌(SCM)肌肉和带状肌肉下,可连续暴露于手术区域。
对接阶段
Da Vinci Si系统(Intuitive Surgical,Inc.,Sunnyvale,CA,USA)停靠在对侧。 机械臂通过切口插入(图12)。 内窥镜位于中央,马里兰抓手放置在非惯用手中,而Harmonic放置在惯用手中。 此时,在环甲膜入口处进行神经解剖,并且通过刺激下屈肌的下缘附近的神经来确认完整性。 停靠机器人需要7分钟。 如上所述在经腋下方法中进行甲状腺的解剖。

图12
Da Vinci Si对接使用30°范围,马里兰解剖器和谐波手术刀。
乳房接近
这种方法允许双侧切除甲状腺叶。套管针尺寸范围从10-15mm端口插入乳房的两个上部环行区域。使用高达6mmHg压力的CO2吹入来建立工作空间。这种技术有两种不同的方法:
腋窝 - 双侧乳房入路(ABBA),利用插入腋窝的第三个端口,允许标本提取。左乳房插入5毫米谐波手术刀,右乳房插入光学套管针。为了获得良好的暴露,同侧皮带肌肉是分开的。然后通过腋窝切口取出腺体;
还开发了双侧腋窝 - 乳房入路(BABA)以获得两个肺叶的最佳可视化。通过在左右腋窝中插入第三和第四端口,可以通过这种方法进行全甲状腺切除术。随着达芬奇手术系统的引入,BABA内镜甲状腺切除术在2008年与机器人甲状腺手术相结合。这样可以更好地显示关键结构,如甲状旁腺,RLN和甲状腺上下血管。
胸壁方法
它也被称为锁骨下入路。这种方法已在亚洲开发并普遍使用。这是双侧甲状腺切除术的一种有利方法。在与病变同侧的锁骨的下边缘下方制作30mm的皮肤切口或制作较大的肺叶。接下来是收回胸大肌上方的肌皮瓣。钝器或内窥镜解剖器用于初始钝性解剖。为柔性腹腔镜引入了12 mm套管针。为了保持工作空间,进行CO2吹入至4 mmHg的压力或使用专门设计的提升装置。引入另外两个套管针,一个5mm套管针插入胸骨切口下方,另一个5mm插入同侧锁骨下方。然后将带状肌肉分开以改善暴露,并且使用超声波剪切进行甲状腺的解剖。然后通过30mm切口抽出甲状腺,颈部不留疤痕。
实验性经口视频辅助或机器人方法
一个德国小组报道了一系列小型经口视频辅助甲状腺切除术。该方法利用10mm舌下矢状切口。通过口部肌肉组织的底部解剖到子半球形平面。然后进行二氧化碳吹入,然后在每个下颌尖牙的侧面进行双侧10mm前庭切口。作者最近报道了在人体尸体中添加机器人技术。然而,这仍然被认为是具有显著报道的转化率和并发症的实验技术。机器人经口骨膜甲状腺切除术(TOPOT)是尸体中描述的另一种跨口技术,其使用骨膜下端口放置和机器人辅助来促进甲状腺切除术的中线进入(21)。
潜在的并发症及其管理
关于术后结果和与机器人手术相关的并发症引起了各种各样的担忧。因此,在融入标准实践之前充分评估这些新技术变得至关重要。在极少数情况下,可能会出现转换为开放手术的可能性,因此,应始终在接受手术前与患者讨论。通过各种方法进行甲状腺切除术可以解决以下并发症:
防甲状旁腺
由于对甲状旁腺的无意伤害,在5-50%时观察到短暂的低钙血症,而在0.5-2%之间观察到永久性低钙血症(低钙血症> 6个月)。应该仔细鉴别甲状旁腺,以防止腺体缺血性损伤。应警告患者低钙血症的症状,如麻木,麻刺感,痉挛性痉挛,癫痫发作和心电图(EKG)的变化。钙(口服/静脉注射)术后补充是这些患者的主要治疗方法。根据血清钙水平调整口服钙补充剂的剂量。如果接受2克口服钙,低钙血症仍然存在,应考虑额外剂量0.25-1 mcg /天钙三醇补充剂。患有严重低钙血症或难以口服补充的患者需要静脉补钙。美国甲状腺协会关于门诊甲状腺切除术的指南要求患者在必要时补充钙,维生素D和骨化三醇(22)。
RLN受伤
各种研究报道了RLN的短暂和永久性损伤。短暂性RLN麻痹率为3-8%,而永久性麻痹(持续超过12个月)为0.3-3%(23)。手术后,对患者进行随访,以发现声音嘶哑,误吸和吞咽困难等症状。然而,双侧脐带麻痹伴有呼吸窘迫,随后出现气道阻塞。
作者机构的患者使用灵活的喉镜进行术前和术后声带评估筛查。这证实了声带的位置,移动性和功能性。疑似双侧声带麻痹的患者可能需要紧急气道管理,并可能通过气管切开术进行明确的管理。因此,要特别注意防止对RLN的任何术中伤害。对于所有甲状腺切除术病例,建议采用视觉识别和使用术中神经监测的标准做法。
喉上神经损伤
在这些手术过程中,喉上神经的两个分支(外部和内部分支)的损伤可能会被忽视。因此,这些神经的识别和安全至关重要。外部分支支配CTM,内部分支为喉部提供感觉神经支配。据报道,58%的病例会对这些神经造成伤害(24)。患者可能出现诸如声音嘶哑,声带疲劳和高音调声音丢失等症状。视频检查和喉肌电图(EMG)评估受影响的声带,在检查时看到低于正常的脊髓。因此,外科医生必须纳入术中神经监测。
颈部血肿
大约1%的患者患有颈部血肿。尽管有生命危险,但可以通过实现充分的止血来预防这种情况(24)。疑似血肿的患者出现窒息,气道受损导致颈部再次探查。在极少数情况下,可能需要立即撤离。建议外科医生进行valsalva动作,以尽量减少切口闭合前出血的风险。应在手术后放置引流管,以进一步减少即将发生血肿的机会。
感染
作为任何外科手术,感染的风险都不容忽视。然而,由于采用先进技术和消毒仪器,脓毒症报告病例显著减少(1-2%)(25)。应该寻找伤口感染的迹象,如发热,蜂窝织炎,切口部位周围的温暖,红斑和压痛,浅表性脓肿和白细胞增多。一旦脓肿发展,就需要将这些脓肿排出并吸出以进行培养。开始广谱抗生素(例如克林霉素,头孢呋辛,氨苄西林 - 舒巴坦)直至获得确定的培养结果。患有浅表蜂窝织炎的患者需要对革兰氏阳性生物(例如链球菌和葡萄球菌)进行抗生素覆盖。 CT引导成像被认为是评估颈部深部脓肿的重要因素。必须遵循美国传染病学会(IDSA)发布的关于预防手术后感染的指南。
臂丛神经失血
Ikeda等。描述了病变侧臂的仔细定位可以防止手术过程中臂丛神经受伤(26)。肌电图可以确诊臂丛神经损伤。检测和预防位置相关的神经病变涉及SSEP(11,15)。臂丛神经失调表现为手臂反射减弱,感觉和运动缺陷。大多数患者自发恢复功能,而其他患者需要矫形器/夹板;物理/职业治疗。手术是为难治性病例保留的。
重要的是进行颈部解剖,同时注意潜在的神经血管结构,同时保持完整的癌症切除。
作者小组报告了其在一部分患有严重疾病的患者中的安全性和可行性,这些患者患有小型胸骨下甲状腺肿(27)。与传统的颈部甲状腺切除术相比,作者还报告了其术后并发症的安全性和类似结果(9,28)。机器人甲状腺切除术显示当天出院率为83.2%,而常规方法显示为34.5%(28)。然而,FDA的限制导致许多北美外科医生逃避使用机器人辅助方法。
结论
机器人手术在很短的时间内提高了外科医生的能力。作者已经成功地报告了甲状腺良性和恶性疾病的管理患者以及没有大型胸骨下甲状腺肿的严重疾病患者的机器人甲状腺切除术的安全性和可行性。作者还报告,与接受常规宫颈途径的患者相比,接受机器人甲状腺切除术的患者的术后并发症没有差异。机器人甲状腺切除术在手术当天的放电率为83.2%,而传统的宫颈方法为34.5%。尽管研究显示可比结果,但在北美测量了机器人辅助甲状腺手术的采用。这可能有几个原因,例如额外的培训,成本,与实现这些技术熟练程度相关的时间。此外,目前FDA对机器人辅助甲状腺手术的限制限制了监督学习的机会,从而迅速采用了这些技术。
机器人甲状腺手术的未来以及它是否被更广泛地采用,在于标准化护理的能力,可靠地建立安全和高质量的结果,至少与传统的甲状腺切除术相当。 在那之前,必须接受“不伤害”的概念,特别是在这些技术的学习曲线期间。 需要进行平衡调查和全面的数据分析,以通过多机构临床试验和维护数据登记,充分探索这种新合并技术的优缺点。
参考:
Remote access thyroid surgery
1. Miccoli P, Bellantone R, Mourad M, et al. Minimally invasive video-assisted thyroidectomy: multiinstitutional experience. World J Surg 2002;26:972-5. [PubMed] [Google Scholar]
2. Bellantone R, Lombardi CP, Raffaelli M, et al. Central neck lymph node removal during minimally invasive video-assisted thyroidectomy for thyroid carcinoma: a feasible and safe procedure. J Laparoendosc Adv Surg Tech A 2002;12:181-5. [PubMed] [Google Scholar]
3. Abdelgadir Adam M, Speicher P, Pura J, et al. Robotic thyroidectomy for cancer in the US: patterns of use and short-term outcomes. Ann Surg Oncol 2014;21:3859-64. [PMC free article] [PubMed] [Google Scholar]
4. Kang SW, Jeong JJ, Yun JS, et al. Gasless endoscopic thyroidectomy using trans-axillary approach; surgical outcome of 581 patients. Endocr J 2009;56:361-9. [PubMed] [Google Scholar]
5. Ruggieri M, Straniero A, Pacini FM, et al. Video-assisted surgery of the thyroid diseases. Eur Rev Med Pharmacol Sci 2003;7:91-6. [PubMed] [Google Scholar]
6. Lombardi CP, Raffaelli M, Princi P, et al. Video-assisted thyroidectomy: report on the experience of a single center in more than four hundred cases. World J Surg 2006;30:794-800; discussion 801. [PubMed] [Google Scholar]
7. Kandil EH, Noureldine SI, Yao L, et al. Robotic transaxillary thyroidectomy: an examination of the first one hundred cases. J Am Coll Surg 2012;214:558-64; discussion 564-6. [PubMed] [Google Scholar]
8. Noureldine SI, Jackson NR, Tufano RP, et al. A comparative North American experience of robotic thyroidectomy in a thyroid cancer population. Langenbecks Arch Surg 2013;398:1069-74. [PubMed] [Google Scholar]
9. Noureldine SI, Lewing N, Tufano RP, et al. The role of the robotic-assisted transaxillary gasless approach for the removal of parathyroid adenomas. ORL J Otorhinolaryngol Relat Spec 2014;76:19-24. [PubMed] [Google Scholar]
10. Park JH, Lee J, Hakim NA, et al. Robotic thyroidectomy learning curve for beginning surgeons with little or no experience of endoscopic surgery. Head Neck 2014. [Epub ahead of print]. [PubMed] [Google Scholar]
11. Landry CS, Grubbs EG, Perrier ND. Bilateral robotic-assisted transaxillary surgery. Arch Surg 2010;145:717-20. [PubMed] [Google Scholar]
12. Katz L, Abdel Khalek M, Crawford B, et al. Robotic-assisted transaxillary parathyroidectomy of an atypical adenoma. Minim Invasive Ther Allied Technol 2012;21:201-5. [PubMed] [Google Scholar]
13. Lee S, Ryu HR, Park JH, et al. Early surgical outcomes comparison between robotic and conventional open thyroid surgery for papillary thyroid microcarcinoma. Surgery 2012;151:724-30. [PubMed] [Google Scholar]
14. Wilson MN. Modification of two-incision trans-axillary robotic thyroidectomy. J Robot Surg 2014;8:325-327. [Google Scholar]
15. Berber E, Siperstein A. Robotic transaxillary total thyroidectomy using a unilateral approach. Surg Laparosc Endosc Percutan Tech 2011;21:207-10. [PubMed] [Google Scholar]
16. Walvekar RR, Wallace E, Bergeron B, et al. Retro-auricular video-assisted "gasless" thyroidectomy: feasibility study in human cadavers. Surg Endosc 2010;24:2895-9. [PubMed] [Google Scholar]
17. Terris DJ, Singer MC, Seybt MW. Robotic facelift thyroidectomy: II. Clinical feasibility and safety. Laryngoscope 2011;121:1636-41. [PubMed] [Google Scholar]
18. Terris DJ, Singer MC. Robotic facelift thyroidectomy: Facilitating remote access surgery. Head Neck 2012;34:746-7. [PubMed] [Google Scholar]
19. Perrier ND, Randolph GW, Inabnet WB, et al. Robotic thyroidectomy: a framework for new technology assessment and safe implementation. Thyroid 2010;20:1327-32. [PubMed] [Google Scholar]
20. Park JH, Lee CR, Park S, et al. Initial experience with robotic gasless transaxillary thyroidectomy for the management of graves disease: comparison of conventional open versus robotic thyroidectomy. Surg Laparosc Endosc Percutan Tech 2013;23:e173-7. [PubMed] [Google Scholar]
21. Lee HY, Richmon JD, Walvekar RR, et al. Robotic transoral periosteal thyroidectomy (TOPOT): experience in two cadavers. J Laparoendosc Adv Surg Tech A 2015;25:139-42. [PubMed] [Google Scholar]
22. Terris DJ, Snyder S, Carneiro-Pla D, et al. American Thyroid Association statement on outpatient thyroidectomy. Thyroid 2013;23:1193-202. [PubMed] [Google Scholar]
23. Jeannon JP, Orabi AA, Bruch GA, et al. Diagnosis of recurrent laryngeal nerve palsy after thyroidectomy: a systematic review. Int J Clin Pract 2009;63:624-9. [PubMed] [Google Scholar]
24. Jansson S, Tisell LE, Hagne I, et al. Partial superior laryngeal nerve (SLN) lesions before and after thyroid surgery. World J Surg 1988;12:522-7. [PubMed] [Google Scholar]
25. Watkinson JC. Fifteen years' experience in thyroid surgery. Ann R Coll Surg Engl 2010;92:541-7. [PMC free article] [PubMed] [Google Scholar]
26. Ikeda Y, Takami H, Niimi M, et al. Endoscopic thyroidectomy and parathyroidectomy by the axillary approach. A preliminary report. Surg Endosc 2002;16:92-5. [PubMed] [Google Scholar]
27. Jackson NR, Yao L, Tufano RP, et al. Safety of robotic thyroidectomy approaches: meta-analysis and systematic review. Head Neck 2014;36:137-43. [PubMed] [Google Scholar]
28. Noureldine SI, Abdelghani R, Saeed A, et al. Is robotic hemithyroidectomy comparable to its conventional counterpart? Surgery 2013;154:363-8. [PubMed] [Google Scholar] |

 使用新型一次性半刚性-柔性输尿管镜进行逆
使用新型一次性半刚性-柔性输尿管镜进行逆
 柔性输尿管肾镜检查 RIRS 单步
柔性输尿管肾镜检查 RIRS 单步
 机器人辅助左肾上腺切除术
机器人辅助左肾上腺切除术
 腹腔镜胆囊切除术及技巧
腹腔镜胆囊切除术及技巧

 发表于 2019-8-6 00:00:33
发表于 2019-8-6 00:00:33
 提升卡
提升卡 置顶卡
置顶卡 沉默卡
沉默卡 喧嚣卡
喧嚣卡 变色卡
变色卡 千斤顶
千斤顶 显身卡
显身卡