马上注册,结交更多好友,享用更多功能,让你轻松玩转社区。
您需要 登录 才可以下载或查看,没有账号?注册
×
概要
借助先进的手术技术和仪器,单端口腹腔镜手术(SPLS)只需两个外科手术成员即可完成:操作员和摄像助手。在这些情况下,通过机械摄像机支架合理地替换人类摄像机助手已经导致称为单端口独立手术(SPSS)的新外科手术。在SPSS中,由机械装置保持的摄像机的固定和协调运动提供了在操作员控制下的固定且稳定的操作图像。因此,SPSS主要受益于提供运营商的眼对手协调。由于SPSS是对SPLS的直观修改,因此SPSS的指示与SPLS的指示相同。尽管SPSS需要比使用人工助手的手术更多的动作,但是这些困难似乎可以通过更多地提供静态操作图像以及需要更少的镜头清洁和相机的重新定位来容易地克服。当预期操作困难且要求苛刻时,除了相机支架之外,还可以通过添加另一个仪器支架来辅助SPSS过程。
关键词:摄像机支架,腹腔镜,单孔腹腔镜手术,单孔独立手术,单独手术
核心提示:当一名外科医生仅使用洗手护士进行手术时,就会发生单人手术。使用机械相机支架使这种手术成为可能。当单手术应用于单孔腹腔镜手术(SPLS)时,单独手术特别有用;它被称为单端口独奏手术(SPSS)。通过在操作员的直接控制下允许固定和稳定的图像,SPSS有助于比SPLS更好的操作环境。在掌握了该技术之后,SPSS指示包括SPLS指示。此外,通过腹膜外应用可以促进切口和腹膜开口的牵开器系统,可以很容易地实现全皮肤到皮肤的SPSS。
介绍
手术技术一直在不断发展,目前正朝着增加激进性和美容效果的方向发展。尽管癌症手术的细致淋巴结清扫代表了对激进的追求,但腹腔镜手术的引入代表了对美容效果的追求。有趣的是,这些努力可能不可避免地导致在行动期间减少人力资源。
手术期间人力资源的减少可归因于先进的手术技术和手段。腹腔镜手术通常需要两到三个手术助手。最近,单孔腹腔镜手术(SPLS)的引入进一步减少了手术构件的数量;在SPLS中,操作员的更大依赖性通常会使得除了相机之外的人类助理持有仪器的需要无效。因此,SPLS通常仅需要两个手术构件,例如操作者和摄像助手。这个由SPLS精心策划的环境开启了独立手术的可能性。
单独手术可以定义为外科医生单独操作的实践,除了擦洗护士外没有其他手术成员[1]。已经发明了几种机械相机支架以促进单独手术。由机械装置保持的相机的固定和协调运动使得可以执行单独手术。在SPLS中,手术医生通过双手操纵来控制整个手术过程,而助手则指导腹腔镜相机。因此,在SPLS中通过机械相机支架简单地替换人类助手使得单独手术成为可能。作者在此称为单独手术(SPSS)单独手术驱动的SPLS;因此,单独手术包括SPSS。目前,SPSS很少报道,因此,应确定SPSS在外科手术中的作用。
SPSS的适应症
最初,SPSS可以应用于在单个腹象限内完成的操作,因为这些类型的操作不需要频繁地重新定位相机。这些手术包括阑尾切除术,胆囊切除术和脾切除术。此外,随着运营商的经验增加,SPSS适应症可以扩展到包括跨象限手术甚至是恶性疾病的手术。作者的机构在2012年9月启动SPLS在2008年10月和SPSS在那段时间里,作者已经进行了一些使用SPSS技术,包括小肠切除术,右半结肠切除术,低位前切除术,全大肠切除操作,合并腹会阴联合切除胆囊切除和,胰腺切除术和活肾供肾切除术。当预期具有挑战性的操作时,除了相机支架[1]之外,还可以通过仪器支架辅助单独手术。根据作者的经验,一旦操作者克服了SPSS的学习曲线,SPSS的指征与SPLS的指示相同,因为SPSS不是为了使SPLS感到不适,而是为了舒适SPLS。
单独手术的优缺点
通过使用相机支架而不是人类相机助手来实现单独手术。由于腹腔镜的操作是出于操作者的意愿,单独手术可以克服腹腔镜手术的主要缺点;即,操作者的眼睛和手之间的分离。腹腔镜通过提供一种到达目标器官的新方法,彻底改变了外科手术。因此,它显著减少了腹壁损伤并加速了患者的康复。然而,与开放手术相比,在腹腔镜手术中,外科医生无法控制自己的手术区域。这种观察和操纵的间接方式阻碍了协调的外科手术,特别是在具有挑战性和复杂的操作中。当助手必须长时间固定时,腹腔镜检查有时会导致外科医生和助手之间的通信问题以及不稳定的相机图像。据报道,不稳定的相机图像直接阻碍了目标导向的手部运动的表现[2]。单独手术在操作者自己的直接控制下提供固定且稳定的图像。因此,单独手术可能是克服这些缺点的最佳方法。
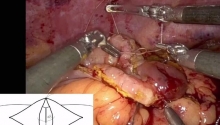
此外,单人手术有助于节省员工人数,从而有助于降低医疗保健成本。在韩国和其他一些国家,外科部门的居住申请数量减少导致一些医院的人力短缺。在这种情况下,单人手术为人力资源有限的大量手术铺平了道路。此外,单独手术为手术医生提供了足够的空间。 SPLS的缺点不仅与乐器的拥挤和冲突有关,而且与不得不与助手共用一个小空间所产生的不适有关。在单独手术中,外科医生可以自由使用可用空间,这不仅提供了舒适的环境,而且使外科医生能够自由,方便地执行各种手术(图11)。

图1
比较单孔腹腔镜手术和单端口独立手术的手术插图。与SPLS相比,SPSS使独立外科医生能够更自由地使用可用空间。 SPLS:单孔腹腔镜手术; SPSS:单端口单独手术。
进行单人手术有几个注意事项。单独手术最严重的缺点是在紧急情况发生和外科手术控制之间可能存在时间滞后,这可能因手术人员后来到来而延迟。为了应对意外的紧急情况,应该在手术室中与人员进行临时(外科手术成员到达之前的时间间隔)手术协助。接下来,固定摄像机支架本身的定位偶尔会妨碍操作过程,这可以通过重新定位来克服。最后,单独外科手术迫使独自外科医生在手术期间单独做出重要的手术决定,不允许外科手术成员之间的讨论,允许独自外科医生感到孤独,并且不提供适当的住院医师培训。
仪器设备
孤星牵开器
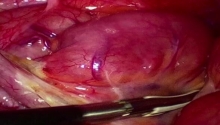
根据外科手术所需的独奏手术比例,单独手术可分为全手术和部分独手术。全独立手术描述了使用单独手术的全部皮肤 - 皮肤受累的手术,并且部分独立手术描述了其中单独手术仅是整个手术的一部分(即,腹腔镜手术)的手术。因此,完整的单独手术包括腹膜外手术的单独表现,包括切口制作和腹膜开放。为此,操作人员可以使用Lone Star牵引器系统(Cooper Surgical,Trumbull,CT)和3毫米尖头一次性挂钩(Cooper Surgical)(图(图22)[3]。孤星牵引器系统是一个自我 - 保留牵开器,最初设计用于肛门手术(例如,肛门直肠吻合术)的卓越可视化,因此它可以成功替换帮助可视化最佳皮肤切口的人员。就像摄像机支架用于腹腔手术一样,所以孤独星形牵开器为完全独立手术中的腹膜外手术提供足够的手术视力。

图2
在单端口独立手术中使用孤星牵引器系统进行脐入路。 SPSS:单端口单独手术。
被动相机架
在单独手术期间使用的相机支架可分为无源和有源相机支架;前者是手动控制的,后者是由电动机驱动的[1]。无源摄像机支架由多个通过球形接头系统连接的杆组成。它的底座固定在手术台导轨上,其尖端通常用夹子抓住相机。当使用无源摄像机支架时,重要的是确定单手重新定位是否可行,因为这增加了操作便利性。
无源摄像机支架可以根据它们是否能够单手重新定位进行细分(图(图3).3)。能够单手重新定位的无源摄像机支架包括Unitrac(AESCULAP,Tuttlingen,德国)[4,5],Endofreeze(AESCULAP)[6]和Laparostat(CIVCO,Carolville,IA)[7]。单手重新定位的球形接头被气动阻挡,只需一只手就可以重新定位。通常通过按下按钮或提供可调节的摩擦来完成重新定位。此外,不允许单手重新定位的无源相机支架包括Martin臂(Gebuder Martin,Tuttlingen,德国)[4,8,9],Karl Storz Holding系统(Karl Storz,Tullingen,德国)[10],以及Assisto(GEOMED,Tuttlingen,德国)[11]。重新定位后,应使用旋钮手动锁定;一只手松开制动器,另一只手重新定位支架。

图3
被动相机支架。它们可以细分为便于单手重新定位的产品(A-C)和不具备(D-F)的产品。A:Unitrack(AESCULAP,Tuttlingen,德国); B:Endofreeze(AESCULAP); C:Laparostat(CIVCO,Carolville,IA); D:Martin手臂(Gebuder Martin,Tuttlingen,德国); E:Karl Storz Holding系统(Karl Storz,Tullingen,Germany); F:Assisto(GEOMED,Tuttlingen,德国)。
无论单手重新定位是否可行,在操作过程中释放和重新定位保持器可能是麻烦的。然而,据报道,这些活动并没有延长手术时间[8,12],这可能是由于相机移动次数大大减少[8,12]和提供更稳定的图像[9,12]。 。在摄像机重新定位期间,通过人工助手或被动支架不能进行操作程序。因此,外科医生指出,重新定位摄像机所消耗的时间间隔不会妨碍协调的操作过程。
有源相机支架
有源相机支架是电动相机支架,其通常由机身和臂组成。各种用户界面决定了控制电动机的方式。这些支架由于其大容量和内置电机而不能完全高压灭菌;因此,在手术过程中,除了可加压加热的部分外,它们用无菌盖布包裹。
已经开发了许多用户界面来代替重新定位期间相机支架的手动释放,包括头部移动,语音控制和手指和脚激活开关[13-15]。这些是控制相机的便捷方式;然而,它们可能不如被动持有者更直观和更慢,因为一个控制活动只允许一个自由度。
其中一个著名的有源相机支架是AESOP机器人(用于最佳定位机器人的自动内窥镜系统; Computer Motion,Coletta,CA)[8,12,14-20]。 它由机器人内窥镜定位系统和肘形臂组成,能够移动由手,脚或语音控制驱动的内窥镜[8](图(图4A).4A)。 包含机电臂的另一个代表性有源相机支架是EndoAssist(Armstrong Healthcare Ltd,High Wycombe,United Kingdom)[8,15,21]。 EndoAssist使用头部运动导航系统(图(图4B4B))。

图4
有源相机支架。A:AESOP机器人(用于最佳定位机器人的自动内窥镜系统; Computer Motion,Coletta,CA); B:EndoAssist(Armstrong Healthcare Ltd,High Wycombe,United Kingdom)。 AESOP和EndoAssist分别根据语音和头部运动信号进行操作。
仪器架
除了相机支架之外,复杂的腹腔镜单独手术程序可以由另一个仪器支架辅助。因为缩回过程是静态的,所以使用被动支架进行缩回似乎是合适的。在使用两个被动支架的单独手术中,操作者应该注意这些支架的定位,因为相机支架的固定有时会妨碍手术过程的便利性。
SPSS的操作程序
在全身麻醉下,患者处于仰卧位。患者的单侧手臂被内收,以便为独立外科医生提供足够的空间。 SPSS只需要一个操作监视器;监视器放在操作员的相对位置(图11)。
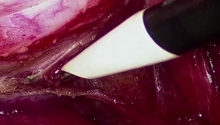
在对患者进行常规涂抹和覆盖后,制作垂直10mm长的经脐部皮肤切口。此后,在皮肤上应用Lone Star牵开器(3307G,Cooper Surgical,Trumbull,CT)(图2)。 Lone Star牵开器系统由自保护牵开环和弹性支撑组成。将Lone Star Retractor放在脐部中心后,放置第一个支架(3311-8G,3毫米尖钩,Cooper Surgical)。将支柱以所需的张力沿所需方向拉动,然后将其放置在牵开器的一个槽中。同样地,将四根支撑缝线反向放置以最大程度地暴露脐的筋膜层。对于完全暴露的筋膜层,筋膜横向切开并进入腹膜。此时,预先建立两条或三条经筋膜留置缝线,以便在手术结束时进行后期筋膜闭合。
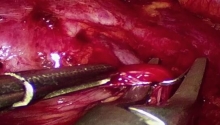
为了执行SPSS,可以根据自己的喜好选择任何类型的专为SPLS设计的单端口。作者通常使用Glove端口(431AT-2W; Nelis,Bucheon,韩国)。在单端口建立后,腹部用CO2吹入12mmHg的压力。然后,独奏外科医生安装有源或无源摄像机支架。在作者的机构中​​,作者使用了无源相机支架(Karl Storz Holding Systems结合了28172 HR,28172 HA和28172 UL)。它具有可锁定的关节机构和五个关节功能,可确保仪器的精确定位。标准腹腔镜5毫米相机(全高清腹腔镜5毫米; AESCULAP)安装在相机支架上。在获得最佳手术视力后,使用相机支架固定腹腔镜(图5A).5A)。此后,独立外科医生可以通过双手操作执行外科手术(图5B).5B)。以下外科手术程序与SPLS没有显著差异。同样,在整个皮肤到皮肤的过程中,只有一名外科医生参与该过程。

图5
单孔独立手术的制备与性能。A:放置单个端口后,腹腔镜连接到机械摄像机支架(Karl Storz固定系统); B:在由机械摄像机支架固定的腹腔镜获得稳定的视野后,由单个外科医生进行手术。
独立手术的手术结果:相关研究
在临床[9,12]和幻像[8]实验中,将被动相机支架与人类相机助手进行了比较,手术时间没有显著差异。然而,据报道,在被动持有者组中,与建立和分解相关的时间延长了。
在临床[12-14,19,20,22-24]和幻影实验[8,25]中,也有一些研究比较了由人类助手或有源相机支架辅助的腹腔镜手术。操作员更加意识到他或她专注于使用有源相机支架的操作,这可能是由于更少的镜头清洁,并且活动支架的操作时间最多与人类助手的操作时间相同。但是,活跃持有人组的设置和故障时间延长。在效率,安全性和提供稳定的手术图像方面,许多论文也支持使用活动支架[12,16,22]。在一项研究中,比较了两个活跃的持有者 - AESOP和Endosista,并且发现AESOP在重新定位时更快更准确[15]。
还比较了有源和无源相机支架和人类助手。在一项比较有源(AESOP)和被动(PASSIST)相机持有人和人类助手的研究中,两位持有者都产生了类似的手术熟练程度和手术时间[12]。此外,与人工辅助相比,使用这些摄像机支架显著减少了摄像机重新定位动作的数量。在幻影胆囊切除术的实验室环境中,人类辅助组显示最短的手术时间,被动持有者组(Tiska和Martin手臂)排名第二;活动持有者组(AESOP,Endosista和FIPS)显示最长的操作时间[8]。作者得出结论,两个被动支架的组合,一个用于范围,一个用于器械,是单独手术期间胆囊切除术的最佳组合。
结论
随着SPLS技术的广泛应用,SPSS适应症已经扩展到包括多个象限甚至恶性疾病的手术。与使用人类助手进行的手术相比,使用主动或被动保持器的单独手术通过允许眼睛和手的协调而直观且熟练,并提供更多静态和稳定的手术图像。虽然与人工助理的手术相比,单独手术需要更多的动作和更长的手术时间,但是这些困难似乎超过了提供更稳定的手术图像以及减少镜片清洁和相机重新定位动作的需要。当遇到具有挑战性的操作时,除了摄像机支架之外,还可以通过添加另一个仪器支架来辅助单独手术。
迄今为止,考虑到成本,方便使用和等效手术结果方面的相对优势,使用被动而非有源相机支架似乎是最有益的。关于无源摄像机支架,作者建议使用支架,因为它们方便,可以单手重新定位。此外,通过腹膜内应用Lone Star Retractor系统可以轻松实现全皮肤到皮肤的独立手术,这有利于切口制作和腹膜开放。
参考:
Technical and instrumental prerequisites for single-port laparoscopic solo surgery: State of art
1. Jaspers JE, Breedveld P, Herder JL, Grimbergen CA. Camera and instrument holders and their clinical value in minimally invasive surgery. Surg Laparosc Endosc Percutan Tech. 2004;14:145–152. [PubMed] [Google Scholar]
2. Mohrmann-Lendla H, Fleischer AG. The effect of a moving background on aimed hand movements. Ergonomics. 1991;34:353–364. [PubMed] [Google Scholar]
3. Lone Star Retractor System. 2014, December 11. Available from: http://coopersurgical.com/Our-Brands/Lone-Star-Retractor-System.
4. Melzer A, Buess G, Cuschieri A. Instrument for endoscopic surgery. In: Cuschieri A, editors. Operative manual of Endoscopic Surgery. 1992:14–36. [Google Scholar]
5. Lee YS, Jeon HG, Lee SR, Jeong WJ, Yang SC, Han WK. The feasibility of solo-surgeon living donor nephrectomy: initial experience using video-assisted minilaparotomy surgery. Surg Endosc. 2010;24:2755–2759. [PubMed] [Google Scholar]
6. Arezzo A, Schurr MO, Braun A, Buess GF. Experimental assessment of a new mechanical endoscopic solosurgery system: Endofreeze. Surg Endosc. 2005;19:581–588. [PubMed] [Google Scholar]
7. Arezzo A Laparostat. 2014, December 11. Available from: https://www.yumpu.com/no/documen ... -medical-solutions.
8. Arezzo A, Ulmer F, Weiss O, Schurr MO, Hamad M, Buess GF. Experimental trial on solo surgery for minimally invasive therapy: comparison of different systems in a phantom model. Surg Endosc. 2000;14:955–959. [PubMed] [Google Scholar]
9. Laporte E, Arner , AM , Garcia San Pedro A. Usefulness of a arm supporting the camera of video-endoscopy. A comparative study with manual guidance: Proceedings 9th Int Congr EAES; 2001. [Google Scholar]
10. KARL Storz Holding systems. 2014, December 11. Available from: https://www.karlstorz.com/cps/rd ... ASSETS/2193450.pdf.
11. Robotics in endoscopic surgery: can mechanical manipulators provide a more simple solution for the problem of limited degrees of freedom? Minim Invasive Ther Allied Technol. 2001;10:289–293. [PubMed] [Google Scholar]
12. den Boer KT, Bruijn M, Jaspers JE, Stassen LP, Erp WF, Jansen A, Go PM, Dankelman J, Gouma DJ. Time-action analysis of instrument positioners in laparoscopic cholecystectomy. Surg Endosc. 2002;16:142–147. [PubMed] [Google Scholar]
13. Gillen S, Pletzer B, Heiligensetzer A, Wolf P, Kleeff J, Feussner H, Fürst A. Solo-surgical laparoscopic cholecystectomy with a joystick-guided camera device: a case-control study. Surg Endosc. 2014;28:164–170. [PubMed] [Google Scholar]
14. Kalteis M, Pistrich R, Schimetta W, Pölz W. Laparoscopic cholecystectomy as solo surgery with the aid of a robotic camera holder: a case-control study. Surg Laparosc Endosc Percutan Tech. 2007;17:277–282. [PubMed] [Google Scholar]
15. Yavuz Y, Ystgaard B, Skogvoll E, Mårvik R. A comparative experimental study evaluating the performance of surgical robots aesop and endosista. Surg Laparosc Endosc Percutan Tech. 2000;10:163–167. [PubMed] [Google Scholar]
16. Merola S, Weber P, Wasielewski A, Ballantyne GH. Comparison of laparoscopic colectomy with and without the aid of a robotic camera holder. Surg Laparosc Endosc Percutan Tech. 2002;12:46–51. [PubMed] [Google Scholar]
17. Roe DB, Wang Y. A voice-controlled network for universal control of devices in the OR. Minim Invasive Ther Allied Technol. 2000;9:185–191. [PubMed] [Google Scholar]
18. Sackier JM, Wang Y. Robotically assisted laparoscopic surgery. From concept to development. Surg Endosc. 1994;8:63–66. [PubMed] [Google Scholar]
19. Fujii S, Watanabe K, Ota M, Yamagishi S, Kunisaki C, Osada S, Ike H, Ichikawa Y, Endo I, Shimada H. Solo surgery in laparoscopic colectomy: a case-matched study comparing robotic and human scopist. Hepatogastroenterology. 2011;58:406–410. [PubMed] [Google Scholar]
20. Proske JM, Dagher I, Franco D. Comparative study of human and robotic camera control in laparoscopic biliary and colon surgery. J Laparoendosc Adv Surg Tech A. 2004;14:345–348. [PubMed] [Google Scholar]
21. Gilbert JM. The EndoAssist robotic camera holder as an aid to the introduction of laparoscopic colorectal surgery. Ann R Coll Surg Engl. 2009;91:389–393. [PMC free article] [PubMed] [Google Scholar]
22. Aiono S, Gilbert JM, Soin B, Finlay PA, Gordan A. Controlled trial of the introduction of a robotic camera assistant (EndoAssist) for laparoscopic cholecystectomy. Surg Endosc. 2002;16:1267–1270. [PubMed] [Google Scholar]
23. Kimura T, Umehara Y, Matsumoto S. Laparoscopic cholecystectomy performed by a single surgeon using a visual field tracking camera: early experience. Surg Endosc. 2000;14:825–829. [PubMed] [Google Scholar]
24. Niebuhr H, Born O. [Image tracking system. A new technique for safe and cost-saving laparoscopic operation] Chirurg. 2000;71:580–584. [PubMed] [Google Scholar]
25. Buess GF, Arezzo A, Schurr MO, Ulmer F, Fisher H, Gumb L, Testa T, Nobman C. A new remote-controlled endoscope positioning system for endoscopic solo surgery. The FIPS endoarm. Surg Endosc. 2000;14:395–399. [PubMed] [Google Scholar] |

 因缺血而行小肠分段切除及一期吻合术
因缺血而行小肠分段切除及一期吻合术
 肌肉活检 _ 如何进行肌肉活检
肌肉活检 _ 如何进行肌肉活检
 尿道下裂修复后包皮瘘和龟头隐裂
尿道下裂修复后包皮瘘和龟头隐裂
 通过外部方法对喉囊肿进行有袋化或去顶
通过外部方法对喉囊肿进行有袋化或去顶

 发表于 2019-7-3 00:00:32
发表于 2019-7-3 00:00:32
 提升卡
提升卡 置顶卡
置顶卡 沉默卡
沉默卡 喧嚣卡
喧嚣卡 变色卡
变色卡 千斤顶
千斤顶 显身卡
显身卡