马上注册,结交更多好友,享用更多功能,让你轻松玩转社区。
您需要 登录 才可以下载或查看,没有账号?注册
×
概要
背景和目标:
机器人上尿路手术在大多数情况下使用标准的5端口配置进行。较少的端口可能会产生侵入性较小的操作。考虑到上述情况,作者报告了一种利用较少端口的机器人辅助腹腔镜肾部分切除术的新技术,并且作者测试了其可行性和安全性。
方法:
回顾性分析了2015年2月至2015年6月使用作者的技术进行的11例机器人辅助腹腔镜肾部分切除术的数据。使用的机器人平台是DaVinci Xi(Intuitive Surgical,Inc.,Sunnyvale,California,USA),具有3臂设置。 AirSeal系统(SurgiQuest,Milford,Connecticut,USA)被用作端口,允许同时为床边外科医生引入2个器械,从而无需额外的(第四个)机械臂。使用长吸灌装置和无创伤抓握钳。这两种仪器都是通过AirSeal系统的套管针引入的,可以同时引入和使用。作者更喜欢长吸水和灌洗装置,因为它可以最大限度地减少仪器的碰撞。
结果:
患者的平均年龄和BMI分别为55±14.6 y和29.18±6.85。右侧有7个肿瘤,左侧有4个肿瘤。肿瘤的平均大小为32.45mm(±11.31)。手术时间为132.2分钟(±37.17),估计失血量和缺血时间分别为103.63 mL(±65.92)和16.72分钟(±9.52)。一名患者术后出血,无需输血即可解决。住院时间中位数为3.9天(±0.53)。未观察到腹内压力的损失,并且压力稳定在10mmHg。
结论:
AirSeal系统及其无阀套管针消除了作者系列中额外端口放置的需要。该技术可行,安全,可重复;因此,它可以在机器人辅助的部分肾切除术的选定病例中实施。
关键词:端口放置,肾癌,机器人肾部分切除术
介绍
自从腹腔镜检查开始以来,外科医生一直对减少口腔放置和减少患者伤疤的想法感兴趣。患者的潜在收益将减少术后疼痛。减少切口数量也有助于术后恢复.1 因此,进行机器人辅助腹腔镜手术的外科医生试图达到这一目标是不可避免的,并且单端口手术已经诞生。然而,机器人单端口手术需要使用新的机器人平台2,这增加了成本并且仍然需要证明其功效和安全性。在下文中,作者描述了一种新技术,其中两个床边手术器械通过无阀气封系统套管针(SurgiQuest,Milford Connecticut,USA)同时引入。这种新技术可以替代上尿路机器人辅助腹腔镜手术中经典使用的5端口配置。
材料和方法
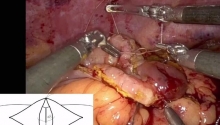
从2015年2月到2015年6月,采用这种新技术进行了11次机器人辅助腹腔镜肾部分切除术。将患者置于改良的侧腹位置,患病侧朝上,然后使用髂前上嵴水平的桌子断裂弯曲。向外的手臂蜷缩在一边。使用的机器人平台是DaVinci Xi(Intuitive Surgical Inc.,Sunnyvale,California,USA),其具有用于所有外科病例的3臂设置。用Veress针建立气腹。使用的端口设置如图1所示。一个8毫米的端口放置在脐管外侧3厘米处。在内窥镜引导下放置两个额外的8毫米端口。第一个放置在直肌鞘的侧面,距离摄像头端口8厘米。第二个是尾部放在同一行的摄像头端口。将一个12毫米的辅助端口放在中线上,距脐管5厘米处。抽吸装置和抓握钳都通过AirSeal系统套管针使用,无论是单独使用还是在所有情况下同时使用,不需要为第四个机器人手臂添加额外的套管针。最好采用长吸灌装置,以尽量减少仪器与无创伤抓握钳的碰撞(图2,33)。

图1。
通过AirSeal套管针插入两种器械的体外视图。

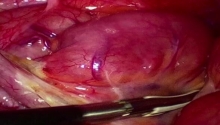
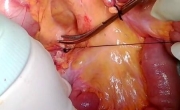
图2。
在机器人部分肾切除术中使用的两种器械的体内视图。

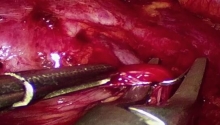
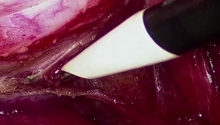
图3。
在通过AirSeal套管针插入两种器械期间,腹内压没有降低。
结果
患者特征显示在表1中。在该研究中登记的11名患者中,8名是男性,3名是女性。患者的平均年龄和体重指数(BMI)分别为55 y(±14.6)和29.2(±6.85)。其中7人患有右侧肿瘤,4人患有左侧肿瘤。肿瘤的平均大小为32.4mm(±11.31)。手术时间为132.2分钟(±37.17),估计失血量和缺血时间分别为103.6 mL(±65.92)和16.7分钟(±9.52)。一名患者术后出血,无需输血即可解决。住院时间中位数为3.9天(±0.53)。表2总结了术中和术后的特征。所有操作均在不需要额外端口放置的情况下完成。通过使仪器穿过AirSeal套管针,腹内压力没有降低,并且稳定在10 mm Hg。
表格1。
患者特征

表2。
术中和术后特征

讨论
腹腔镜手术的手术经验随着时间的推移而增加,腹腔镜手术的新目标之一是通过更少的端口和切口实现相同的良好结果。这一挑战促成了腹腔镜单点手术(LESS)的建立,其中使用了一种新颖的多通道进入系统,其允许通过1个切口同时通过几个腹腔镜器械。根据具体的手术指征,筋膜切口的大小取决于端口可以容纳和变化的器械的数量和大小.5尽管这种技术很有前途且其结果不逊于标准腹腔镜手术,但其主要优点仍局限于改善美容效果。即使对于经验丰富的腹腔镜外科医生来说,具有挑战性的人体工程学和仪器碰撞也会使这项技术变得更加苛刻
机器人技术通过新改进的外科手术平台满足了这一需求,该平台的开发是为了满足机器人(L)LESS程序的需要。该系统的初步经验结果很有希望,但其安全性和可行性尚未确定.7,8 R-LESS程序需要新的机器人手术系统和新型仪器,进一步增加了成本。与传统的机器人程序相比,没有明显证明的主要优点,至少是最新的。
在机器人辅助的部分肾切除术期间最小化端口的数量可能是有利的。减少一次切口可能会减少术后疼痛(即使证明这一假设具有挑战性),并提供略微改善的美容效果。消除使用一个机械臂将减少开支。受此概念的启发,作者开发了一种仅使用4个端口的技术(3个机器人和1个助手)。从辅助端口,作者能够以最小的碰撞同时插入2个仪器。第四个机器人手臂的作用是在肿瘤切除期间帮助肾门切除和肾脏操作。在本技术中,助手设法在手术的这些步骤期间成功地帮助控制台外科医生,因此避免了对第四机器人臂的要求。此外,这部分程序是在可接受的仪器碰撞下完成的。使用长抽吸装置是防止仪器在通过同一端口时发生冲突的关键。使用4端口技术的一个有趣的观察结果是气腹总是稳定的,即使AirSeal套管针内有两个5毫米的器械也是如此。尽管通过AirSeal端口的一个10毫米仪器会影响气腹,但同时引入两个5毫米仪器并没有产生同样的影响。因此,可以同时使用2个仪器进行收缩和抽吸。
作者的中位手术时间为132分钟,热缺血时间为16.72分钟,与文献报道的相同(手术时间,83-265分钟;热缺血时间,21-31分钟).9本技术与任何并发症无关(Clavien-Dindo等级≥2),证明它具有潜在的安全性。它似乎很容易再现,因为它涉及端口的标准三角形放置,这是大多数上尿路外科医生所熟悉的布置。
作者承认作者的研究存在一些局限性。首先,该系列包含的案例太少,无法得出明确的结论。 11例患者中无上肢肿瘤;手术切除上极肾肿瘤可能需要增加第四个机械臂。这种技术还与控制台外科医生的自主性有所妥协,因为他控制的机械臂少了一个。最后,没有记录疼痛评分,因此没有得出关于较少端口对术后疼痛的潜在积极影响的结论。
本研究的目的主要是评估该技术的可行性和安全性。需要进一步研究将结果与标准5端口方法进行比较,以证明其是否具有任何临床优势。
结论
通过AirSeal系统及其无阀套管针使用抽吸装置和抓钳减少端口数量可以替代上尿路机器人辅助腹腔镜手术中通常使用的5端口配置。该技术似乎是可行和安全的,因此可用于机器人辅助的部分肾切除术的选定病例。
参考:
Minimizing Ports During Robotic Partial Nephrectomy
1. Autorino R, Cadeddu JA, Desai MM, et al. Laparoendoscopic single-site and natural orifice transluminal endoscopic surgery in urology: A critical analysis of the literature [review]. Eur Urol. 2011;59:26–45. [PubMed] [Google Scholar]
2. Kaouk JH, Haber GP, Autorino R, et al. A novel robotic system for single-port urologic surgery: First clinical investigation. Eur Urol. 2014;66:1033–1043. [PubMed] [Google Scholar]
3. Harper JD, Leppert JT, Breda A, et al. Standardized linear port configuration to improve operative ergonomics in laparoscopic renal and adrenal surgery: Experience with 1264 cases. J Endourol. 2011;25:1769–1773. [PubMed] [Google Scholar]
4. Chow GK, Blute ML. Surgery of the adrenal glands. In: Wein AJ, Kavoussi LR, Novick AC, et al., editors. , eds. Campbell-Walsh Urology. Philadelphia: Saunders-Elsevier, 2007, pp 1868–1888. [Google Scholar]
5. Desai MM, Rao PP, Aron M, et al. Scarless single port transumbilical nephrectomy and pyeloplasty: First clinical report. BJU Int. 2008;101:83–88. [PubMed] [Google Scholar]
6. Autorino R, Kim FJ. Urologic laparoendoscopic single-site surgery (LESS): Current status. Urologia 2011;78:32–41. [PubMed] [Google Scholar]
7. Mathieu R, Verhoest G, Vincendeau S, et al. Robotic-assisted laparoendoscopic single-site radical nephrectomy: First experience with the novel Da Vinci single-site platform. World J Urol. 2014;32:273–276. [PubMed] [Google Scholar]
8. Kaouk JH, Autorino R, Laydner H, et al. Robotic single-site kidney surgery: Evaluation of second-generation instruments in a cadaver model. Urology 2012;79:975–979. [PubMed] [Google Scholar]
9. Hsieh TC, Jarrett TW, Pinto PA. Current status of nephron-sparing robotic partial nephrectomy. Curr Opin Urol. 2010;20:65–69. [PubMed] [Google Scholar] |

 因缺血而行小肠分段切除及一期吻合术
因缺血而行小肠分段切除及一期吻合术
 肌肉活检 _ 如何进行肌肉活检
肌肉活检 _ 如何进行肌肉活检
 尿道下裂修复后包皮瘘和龟头隐裂
尿道下裂修复后包皮瘘和龟头隐裂
 通过外部方法对喉囊肿进行有袋化或去顶
通过外部方法对喉囊肿进行有袋化或去顶

 发表于 2019-6-26 00:00:25
发表于 2019-6-26 00:00:25
 提升卡
提升卡 置顶卡
置顶卡 沉默卡
沉默卡 喧嚣卡
喧嚣卡 变色卡
变色卡 千斤顶
千斤顶 显身卡
显身卡