马上注册,结交更多好友,享用更多功能,让你轻松玩转社区。
您需要 登录 才可以下载或查看,没有账号?注册
×
概要
疝气的手术治疗在整个手术过程中得到了发展。对疝气手术的迷恋在一定程度上取决于其流行程度和各种治疗方案。微创疝气手术的目标是在最小的并发症的情况下进行强有力的修复,并且在复杂的腹壁疝中正在开发新的机器人技术并且具有有希望的结果。本文综述了腹股沟,腹侧和切口疝及其结果,并讨论了传统的开腹,腹腔镜和机器人技术。还概述了微创疝手术的患病率及其优点。作者强调了作者在这些手术中的经验,特别是机器人疝修补术,因为它涉及腹侧切口和腹股沟疝修补术。作者得出结论,机器人平台证明是对疝气修复的好处。许多研究显示其可行性和与标准腹腔镜检查相当的结果,并且一些研究显示出改善的结果,包括缩短住院时间而不显著增加成本。疝气修复的机器人选择导致微创疝修复增加,这一数字在过去十年中一直停滞不前。随着越来越多的外科医生获得培训和经验以及更高的机器人平台可用性,作者期望看到更多的微创疝修补术。
关键词:疝气,疝气修复,腹侧,切口,机器人,腹腔镜
介绍
疝概述
自人类病史开始以来,疝气及其治疗的概念已经出现.1疝气的治疗随着手术的发展而进展,并且新的假体技术促进了疝气修复的进展。对疝气手术的迷恋在一定程度上取决于其流行程度和各种治疗方案。然而,Herniorrhaphy并非没有并发症的风险。疝气手术的目标是进行强有力的修复,同时尽量减少并发症。微创疝气手术可以减少开放手术常见并发症的风险。微创疝手术的新技术来自以前的开放手术,现在更加复杂的腹壁疝进行机器人接近。这些结果对于患有复杂腹部疝的患者是有希望的,这些患者可能需要强烈的解剖学修复但仍然可以从微创方法中受益。腹壁疝被定义为腹腔内组织通过腹壁缺陷突出,称为腹疝。疝气可以是自然解剖缺陷(裂孔或腹股沟疝)的扩大,也可能是受损组织中新缺陷的发展。为了讨论的目的,作者将专注于腹股沟,腹侧和切口疝。腹疝类包括脐带,上腹部和spigelian疝。
在这篇综述中,作者讨论了传统的开腹和腹腔镜疝修补术和结果。概述了微创疝手术的流行及其优点。作者强调了作者在微创疝气手术中的经验,特别是机器人疝修补术,因为它涉及腹侧切口和腹股沟疝修补术。
疝气手术
开放式疝修补术被认为是普通外科医生的“面包和黄油”手术,因此其管理具有重要意义。虽然疝气是医生看到的最常见的病症,但由于管理层缺乏共识,他们的治疗方法在外科医生之间差异很大.2 疝气通过传统的开放手术或微创技术进行修复。微创疝手术与相似的复发率和较少的并发症如手术部位感染相关.3尽管微创手术具有这些优点,但传统的开放式疝气手术似乎仍然是治疗的主要因素,因为大多数腹壁疝修复以这种方式。话虽如此,大多数腹侧和腹股沟疝仍然采用开放式技术进行修复.3,4由于技术难度,微创疝修补的学习曲线陡峭,这是导致这个数字很低。随着机器人平台的出现,这个数字正在增加。达芬奇机器人平台允许外科医生通过更好的可视化和萎缩运动的能力,在微创上完成技术上难以完成的手术。机器人手术现在也在复杂的腹壁疝中起重要作用。开放性复杂疝手术具有显著的并发症发生率,并且在过去20年中手术技术没有太大变化。随着技术的发展,网状假体的材料生物科学不断发展,在讨论机器人辅助疝手术的当前趋势时,这两者是相辅相成的。
网格选择
这个备受争议的主题的另一个组成部分是网格选择。除生物制剂外,聚丙烯和聚酯是用于制造网状假体的最常用材料。制造过程始于加工成聚丙烯或聚酯颗粒的原材料。将它们挤出成纤维,然后编织成预先设定的特定图案。这种模式对最终产品的特性很重要。理想工程假体应该是坚固的,柔韧的,非过敏性的,非致癌性的并且刺激成纤维细胞活性。弹性,刚度,爆裂强度,拉伸强度和柔顺性是在开发假体时详细研究的参数。这些可能与密度,重量和孔径有关。如果需要腹板放置的目的,网也可以涂有不同的材料。因此,有许多可能的品种,很少有研究表明有最好的网状假体。许多外科医生可能不知道他们的轻微差异,他们的偏好可能基于其他因素,如可用性和成本。例如,医院可以专门向某些公司提供合同产品。关于哪些产品可用的决定通常由非临床管理员或该医院的一小组外科医生做出。这通常可以将成本降至最低,但限制了外科医生的选择,因此也限制了其他产品的使用体验。
选择网状物时,孔径,密度和拉伸强度是重要的特性.5 有充分的证据表明,使用轻质网状物不适合腹侧疝的“桥接”修复,轻质网状物也可能不适合腹股沟疝具有很大的直接缺陷。粘连形成也是一个重要因素,特别是在处理随后的腹部手术时.6 对粘连屏障的研究很多;然而,证据并不清楚哪个障碍是最好的。选择网格时,应考虑前面讨论的所有这些要点。此外,外科医生应该对他们决定放置在患者腹腔内的产品感到舒适,熟悉和自信。
网格固定
过去20年中网状物使用的增加有助于降低复发率。网状物固定的目的是允许网状物的充分粘附,同时允许其以最小的术后疼痛并入腹壁组织中。结果是预防疝气复发和避免慢性疼痛。钉子,固定缝合线,胶水和自粘网是目前外科医生可以选择的选择。由于可用的方法多种多样,网状物固定几乎没有标准化,这部分是由于缺乏强有力的证据以及疝气技术不断变化的事实。疼痛与穿刺器和经筋膜固定缝线有关,因此有动力以其他方式创造坚持。外科医生担心使用粘性网状固定(TMF)进行腹腔镜腹股沟疝修补术会导致耻骨性骨炎,神经卡压和慢性腹股沟疼痛的显著风险.7 TMF对胶网固定的荟萃分析( GMF于2013年发表,发现手术时间,围手术期疼痛,术后并发症,复发和住院时间没有差异。然而,慢性腹股沟疼痛的发展存在差异,而GMF组患者的慢性疼痛发生率明显较低。然而,在这个比较中,只有四项研究有助于分析,这些研究具有中度到实质的异质性。总体而言,当应用于腹股沟疝修补术时,使用胶水可能具有与固定器固定相当的效果.8,9在腹侧疝,固定缝线和双冠技术的攻击者似乎对网状粘连具有最大的安全性.10在机器人腹侧疝修补术中,网状物可以通过这些方式中的任何一种固定,或者甚至以跑步或间断的方式缝合。相似的结果.11在腹股沟疝中描述了自粘网状物,有或没有固定,初步结果令人鼓舞.12与网状物选择类似,固定选择最终取决于外科医生,并取决于他们的个人经验。随着更多研究的发表,可以实现标准化。
开腹腹股沟疝修补术
开腹性腹股沟疝修补术仍然是腹股沟疝修补术的主要支柱,大多数选择性腹股沟疝修补术是通过传统的开放式技术完成的。腹股沟疝的现代治疗始于紧张状态下的初级修复。 Bassini因其对腹股沟管后壁的解剖修复而闻名.13他收集了大约200名患者的数据,并追踪他们的手术结果。其次是Lichtenstein和Shulman,他描述了迄今为止最流行的技术;无网格修复。在他的技术中,将插头放置在外环内并在腹股沟地板上放置贴片。然后将网状物缝合到联合肌腱,搁架边缘和耻骨结节处。利希滕斯坦和舒尔曼通过发布他们的前1000个案例并取得了优异的成果,推广了这项技术。这彻底改变了疝修补术,因此复发率下降。虽然存在各种网状假体,但实际技术并未发生显著变化。并发症包括伤口感染,术后疼痛和疝复发。与微创疝修补术相比,伤口感染减少,术后疼痛和复发倾向于与开放性对照相似。
腹腔镜腹股沟疝修补术
腹腔镜下腹股沟疝修补术首先在1979年被描述,他在腹腔镜下关闭了颈部.2现在最常用的技术分为经腹腹膜前(TAPP)或完全腹膜外(TEP)方法,并涉及放置啮合。这两种技术在手术时间,术后疼痛,恢复工作和复发方面都有相似的结果.14对于对侧疝和嵌顿疝患者进行TAPP的一些报道优势,其中肠的直接可视化很重要。与开放式疝修补术相比,腹腔镜修复术可减少术后疼痛和伤口感染,并提早恢复工作。
尽管腹腔镜腹股沟疝修补具有这些优势,但采用标准实践与腹腔镜胆囊切除术形成鲜明对比,腹腔镜胆囊切除术自1985年第一例开始以来已成为护理标准。这是由于即使对于那些已经完成的人来说陡峭的学习曲线也是如此。微创手术的奖学金。尽管进行了这种高级培训,但并非所有受过奖学金培训的外科医生都会在实践中进行微创腹股沟疝修补术。部分困难来自技术方面,例如较小的工作空间和腹腔镜处理网格的困难。此外,解剖学考虑因素不同,因为标志性结构从不同的有利位置可视化。为了熟悉这种解剖结构并稳定手术时间,可能需要约20例。然而,腹腔镜修复应该是双侧腹股沟疝和复发性疝的选择,并且可以接受单侧疝修补术。
机器人腹股沟疝修补术
由于腹腔镜腹股沟疝修补术未得到广泛应用,机器人平台已成为微创腹股沟疝修补术中不可或缺的一部分。对于外科医生而言,令人满意的运动,三维可视化和出色的人体工程学设计使得该技术成为比其腹腔镜对应物更容易采用的技术。泌尿科医师在进行根治性前列腺切除术时报告了机器人腹股沟疝修补的第一份报告[17,18]。自这些初步报告以来,普通外科医生正式进行腹股沟疝修补术的出版物已经出版。 Escobar Dominguez等[19]发表了他的78例患者,他们接受了机器人腹股沟疝修补术,结果显示具有相似的成本影响。 Waite等人发表了一系列较小的机器人TAPP与腹腔镜TAPP系列,并显示术后疼痛得到改善,手术时间增加,费用相近。
成本控制是所有照顾患者的有效关注点。在初步印象中,人们可能会认为机器人疝气修复成本过高。在进一步检查时,在大多数情况下,机器人已经被购买用于泌尿科和妇科等专科。与其腹腔镜对应物相比,外科医生可以通过消除用于实施标准腹腔镜TEP的那些球囊隔离物来显著降低手术成本。对于使用定位装置的外科医生来说,缝合或自粘网是合理的替代方案。在机器人修复中,TAPP更常用,因为在这种技术中,有更大的工作空间,这使得该过程在技术上更容易。这一点在身体较小的患者中更为突出。总体而言,由于机器人平台的技术简便性,作者可以预期外科医生进行微创疝气手术的人数会增加。这转化为患者的益处,因为微创疝修复具有短期和长期的多种益处。
手术技术 - 机器人腹股沟疝修补术
机器人平台Si和Xi是机器人腹股沟疝修补的最佳选择。在使用Si平台时,用于对接的推车放置位置是最重要的。相反,Xi平台允许在所有情况下进行侧面对接。通过脐周切口进入腹腔。如果患者先前有中线切口并且中线入口不安全,则使用Palmers点(主要左上象限)进入。根据外科医生的选择,使用Hassan技术放置Veress针,光学套管针或直接切割,可以进入腹膜腔。如果使用Hassan技术,则需要使用与所使用的机器人平台兼容的套管针。用CO2吹入15mmHg是标准的。其余的双侧机器人套管针在直接腹腔镜视觉下引入。这些通常放置在脐部水平或略高,取决于患者的腹围。对于身体较小的患者,作者将套管针更多地放置在头部,以确保足够的工作空间(图1)。在达芬奇Si平台上,机器人推车的对接可以在患者之间进行截石术,也可以在患者仰卧时横向完成(图2)。作者选择的位置是适度的特伦德伦堡。不需要在疝气的同侧进行对接以进行修复。无论机器人推车的位置如何,平行或侧面对接都可以进入两个腹股沟区域(图2)。

图1
套管针放置的示意图,示出了头部定向(A)和实际头部套管针定向的示例(B)。
缩写:MCL,锁骨中线; SUL,旋转斜线。

图2
机器人与达芬奇Si对接可以进入双侧腹股沟区域。
Xi模型允许从任一侧对接。 TAPP仍然是机器人腹股沟疝修补的首选方法。这种方法的解剖结构与传统的开放式方法不同。在打开腹膜之前,应确定中位脐带韧带,髂外血管和性腺血管。作者从髂前上棘和内侧脐带韧带之间的腹膜切口开始。腹膜开口和解剖可以用剪刀或带烧灼的钩子进行。用于机器人的血管密封装置也可以用于此目的,但是更昂贵。必须认识到仪器的成本,因此作者努力将仪器使用限制为三种仪器的组合。例如,典型的机器人腹股沟疝可以使用抓紧器,带有烧灼的剪刀和缝合线切割针驱动器。切口必须足够宽,以便能够进入Cooper韧带和侧腹壁,并且足够大,以便舒适地包含适当大小的网状物。通常估计皮瓣尺寸贴合网状物。太大的皮瓣将增加手术时间并允许更容易的网状物移动,而太小的皮瓣和解剖将不允许舒适地放置适当尺寸的网状物。在后一种情况下,网格可能会在下边缘卷起,这可能会导致再次发生。
在作者的技术中,一旦作者的皮瓣被创建,作者专注于解剖Cooper韧带,就在耻骨联合的侧面。这将有助于识别腹膜前解剖结构。首先通过解剖内侧空间来识别Cooper韧带。这通常在解决疝气之前完成,因为它是一个有用的标志,特别是当疝囊很大并遮盖解剖区域时。一旦Cooper韧带被识别并且清晰可见,作者鼓励对腹膜前间隙进行横向解剖。这将确保更容易识别精索,输精管和其他重要结构(图3)。疝囊必须完全脱离精索,以避免疝气复发。如果大的阴窦疝可能会使夹层变得具有挑战性,可以将囊横切并留在原位,小心闭合腹膜缺损。如果已决定结扎囊,则囊的最窄点是最佳的,因为这将减小需要闭合的腹膜瓣中的缺损的大小。解剖完成后,可以将网状物放置在适当的位置。网状物的输送可以在对接机器人之前的程序开始时或者在床边通过8mm机器人套管针在适当的时间进行。当放置在手术开始时,作者将网状物和缝合线放置在骨盆入口处,在那里它是恒定的视图,但不在解剖的方式。当使用自粘网时,当直接缺陷较大时需要缝合固定。网状物跨越从耻骨结节到侧腹壁的空间,覆盖间接和直接缺陷。如果要进行固定,将不可吸收的缝合线或钉子放置在Cooper韧带和上腹壁上,位于上腹血管的内侧和外侧。必须小心且策略性地放置自粘网,以防止需要“取下”网状物并重新涂抹。作者更喜欢从Cooper韧带开始将网状物从内侧向外侧滚动。这确保了在定位时足够覆盖内侧空间。足够的覆盖率是关键,因为这可以减少复发(图4)。除了这种技术,可以用带倒勾的缝线封闭大的直接缺陷。这可以用于防止网格通过大缺陷而发生事故。

图3
腹股沟解剖的例证。
注意:顶部箭头显示上腹部血管,下部箭头显示精索内的输精管。

图4
一旦疝囊减少,网状物就被放置在适当的方向,并有足够的直接和间接空间覆盖。
然后用运动带刺的可吸收或永久性缝线封闭腹膜瓣。 倒钩缝合线的使用促进了这种闭合,因为它在重新接近期间保持“张力”。 由于带刺的缝合线粘附到肠道,手术后有一些肠梗阻的病例报告.21 由于暴露的长段缝合线可能导致肠道陷入困境,作者努力“收紧”缝合线。 可能是为了将其埋入腹膜内(图5)。 总体而言,带刺缝合被认为是腹腔内手术的安全; 然而,外科医生应该意识到这种罕见的并发症。

图5
将带刺的缝合线埋在腹膜内可确保足够的闭合并防止肠道截留等并发症。
腹侧和前切口腹壁疝
前切口和腹壁腹壁疝是常见的病理。切口疝在先前的手术后发展,并且这大约以15-20%的速率发生。据估计,美国每年修复约400,000-600,000个切口疝.22,23 切口疝的风险从手术开始逐年增加。治疗是手术,传统上这些疝气作为开放手术修复,有或没有网状假体的放置。有多种方法可以修复这些疝气以及各种各样的假肢可供选择。外科医生最终决定哪种技术最适合他们的患者。存在多种修复疝气的技术。因此,手术治疗缺乏标准化;因此,在讨论最佳技术,患者选择和所用假体的选择时存在争议。关于这个主题的研究来自汇总数据,因此解释可能会令人困惑。
修复过程中的网格可以在解剖学上放置在不同的位置,这一直是一个争论的话题(图6)。放置在筋膜上方的网格称为“镶嵌”。放置在后直肌鞘和直肌之间的网状物指的是下层放置。最后,当网状物靠着腹膜放置时,它被认为处于底层位置。一项大型Cochrane评价24比较了onlay与sublay网格的位置,并且未能显示出这两种技术的优势。网状修复与较少的复发相关,标准体重网显示出比轻质网状物更低的复发重量.24 作者知道,对于大型复杂的腹壁疝,发病率很高,如果可以采用微创方法进行修复,患者的风险可以显著降低。患者选择是这种方法的关键,因为先前多次腹部手术,先前的网状放置和大尺寸疝缺损可能是微创方法的相对禁忌症。根据外科医生的经验,较大的缺陷可能会通过开放技术显示出更好的结果。对于大型复杂腹壁疝的患者,主要闭合性缺损可能是长期结果的最佳选择.25随着机器人的出现,现在这种做法微创,结果很有希望。消除大开口切口的发​​病率,并保持疝气修复的强度。为了清楚地说明这一点,作者首先讨论开放腹侧和切口疝修补术。

图6
网格放置的不同解剖位置的轮廓。
打开腹侧疝修补术(OVHR),有或没有网状物
传统的开放式疝修补术是在使用或不使用网状物的情况下描述的。已经表明,网状放置降低了复发率;因此,在网格合适的情况下,应使用假体.24网格的放置位置不同,这增加了各种技术。 Onlay指的是将网状物直接放置在皮下组织正下方的筋膜顶部。虽然这不是最受欢迎的,但已经证明这种放置与其他放置一样有效.26底层网状物靠着腹膜放置,当达到4-5cm的重叠时是最佳的。底衬放置最通常通过将网状物周向缝合到筋膜的下侧抵靠腹膜同时实现4-5cm重叠来进行。然后通常在网状物顶部封闭筋膜。这可以在使用或不使用组分分离的情况下完成。 Rives等人27描述了一种子网技术,其中网状物被放置在肌肉上。如果需要,这也可以与组件分离相结合以近似筋膜边缘。网格的位置是否影响结果是一个争论的主题:已经证明子层在重现方面优于底层.28然而,与onlay相比,sublay也被宣称对sublay技术没有任何优势,而其他已经显示出显著的优势.28,29争论仍在继续,美国普遍采用衬底修复的趋势,而在欧洲,衬垫修复是标准的。
腹腔镜腹侧和切口疝修补术(LVIHR)与网状
腹腔镜腹侧疝修补术最初在20世纪90年代早期被描述为桥接腹膜内覆盖网(IPOM)修复。金属钉最初用于固定网状物,后来实施了经筋膜固定缝线,降低了复发率.30 LVIHR最常用于腹腔镜IPOM修复。所描述的技术是非常标准的并且包括放置网状假体以“桥接”疝缺陷。基于证据的重要技术要点包括网状重叠,使用经筋膜固定缝合线,以及“双冠”技术用于放置定位器。事实证明,与开放性疝气修复相比,住院时间更长,恢复工作更快,感染率显著降低,这是LVIHR的有益效果.31,32腹腔镜检查的另一个好处是能够评估整个筋膜,因此可以检测到并发疝气并在同一时间修复。即使发病率降低,仍然只有20-27%的腹侧疝修复腹腔镜.4 通常,在LVIHR中,筋膜缺损未闭合。通过这种“桥接修复”,较大的缺陷往往具有较高的复发率。 LVIHR的缺点包括网状物的事件,以及更多的急性和慢性疼痛.33此外,腹膜内网状物的放置增加了后续腹部手术中进行肠切开术的风险.34 据认为,桥接修复不太稳健,因为力量由网眼上的斜肌施加可导致复发。此外,当筋膜接近中线时,力分布更均匀,因此修复更强。已经表明,当关闭缺损以及网状物放置时,疝气修复的成功率得到了改善.25这种做法不经常进行腹腔镜检查,只有最熟练的微创外科医生才能完成。因此,LVIHR的益处与传统开放技术的益处可能会使作者在这些患者中获得更好的结果。直到最近在疝气修复中使用机器人技术之前,这种情况还没有完成。
机器人腹侧疝气修复
随着机器人技术的出现,更大更复杂的疝气修复正以微创的方式进行。微创机器人平台有利于筋膜闭合,网状物的后纵隔放置,直肌释放以及网状物的腹膜内缝合的益处。机器人疝气修复的目标是获得通过开放技术实现的相同质量的疝气修复,同时消除其围手术期发病率。虽然筋​​膜闭合和网状物的位置是值得商榷的,但机器人辅助手术给予微创疝外科医生比标准腹腔镜检查更多的选择。 IPOM和IPOM-plus(即具有体内筋膜闭合的IPOM)通常是微创疝外科医生的两种选择。 Allison等[35]用体内筋膜闭合研究了机器人腹腔镜切口疝修补术。本研究观察了13例中小型腹侧疝患者,平均筋膜缺损为37.39 cm2。使用运行的O-可吸收缝合线闭合缺损。平均手术时间为131分钟,发病率为13%。平均住院时间为2.4天,只有一名患者出现复发性疝气。虽然这是一项短期随访23个月的小型研究,但它显示了机器人辅助疝修补术的可行性,结果相似.35 Gonzalez等[11]描述了机关闭式疝修补术与筋膜闭合术并将其与腹腔镜队列进行了比较。在该方法中,筋膜在没有切除囊的情况下自动闭合。然后将腹膜内网眼缝合到腹膜内层垫位置。在这次修复中,安全性和有效性很明显。值得注意的是,机器人组的筋膜闭合复发率较低。机器人辅助疝气修复的早期研究通常接近中小型疝气。 Warren等[36]描述了他的后肌和经腹直肌(TAR)释放修复,并将其与传统的腹腔镜修复进行了比较。疝气通常较大,平均面积为88 cm2。在该技术中,将后筋膜切开至半月线,然后在必要时释放直肌。即使对于大的缺陷也可以实现缺陷的闭合,并且通过将网状物放置在后腹膜和腹膜前,将网状物排除在腹腔内。修复疝气时,至少有5厘米的重叠是目标。在这项单一机构研究中,103名接受腹腔镜腹侧疝修补术的患者与53名接受机器人后腹侧疝修补术的患者进行了比较。通过对年龄,人口统计学和疝气进行调整,发现使用机器人96.2%的时间实现筋膜闭合,而腹腔镜技术仅占50.5%。然而,手术时间相当长,机器人平均手术时间为245分钟,而平均手术时间为122分钟。机器人技术在术后麻醉要求方面优于腹腔镜,需要减少0.4的吗啡当量,并且中位长度的停留时间少于1天。相反,机器人队列中血清肿发生率较高,分别为47.2和16.5%.36 Liang等[37]发表了对腹疝修复最佳实践的系统评价。所有专家都同意,专家小组的答复被用来达成共识。筋膜闭合和微创技术具有基于证据的益处,因此,机器人技术有助于促进这一点。辩论的关键在于囊是否应该切除,也应该在网状物的位置。一些人已经提到将囊结合在筋膜的闭合物内以减少血清肿形成;然而,迄今为止还没有数据支持这一点.36关于网格的定位,数据是可变的,一些研究表明子区位置最佳.37最终,这个决定取决于外科医生进行手术。如果外科医生认为对于特定患者来说,子位置会更好,那么机器人逆行修复是一种选择。
手术技术:机器人腹侧切口疝修补术
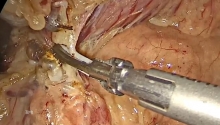
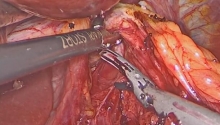
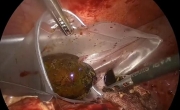
在机器人腹侧疝修复中,如前所述获得腹部通路。端口放置在横向,以便尽可能多的工作空间(图7)。在非常大的疝气中,可能需要双重对接技术。因此,可以在另一侧的相同位置放置额外的端口(图8)。任何阻止解剖的粘连都通过腹腔镜取下。作者通过切开对侧后直肌鞘开始逆行切除术。作者通常使用热剪来解剖这部分。如果缺陷偏离中线,作者可以在内侧进入逆行进入空间并横向工作。对于中央疝,作者通常从中线开始并切开后直肌鞘(图9)。通过双对接技术在两侧进行横向解剖。在疝缺损边缘上方5厘米处和下方的解剖允许适当放置适当大小的网状物。网格选择取决于外科医生。侧向边界是侧向射孔血管,解剖仅在内侧进行。如果可能,切除囊(图10)。在某些情况下,作者选择离开囊并将其与筋膜闭合物结合。完全解剖后,作者将筋膜边缘与运行带倒刺缝合线接近(图11)。从相对的两端开始使用两根缝合线。在缺陷可能太大而不能舒适地接近筋膜的情况下,腹横肌可以用热剪或血管封闭装置释放。腹横肌应该在侧向穿孔血管的内侧释放,一旦对半月线进行了纵向解剖,这种血管就会变得可见。然后将网状物放置在直肌上,可以用钉子或固定缝合线或胶水将其固定到位(图12)。自粘网也是一种选择。后腹直肌鞘和腹膜在网上闭合,使其不可见或与腹内内容物接触(图13)。

图7
端口的横向放置使工作区域最大化。
缩写:MCL,锁骨中线; SUL,旋转斜线。

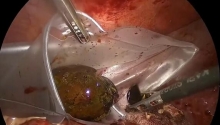
图8
大的前切口疝缺损。

图9
逆时针解剖囊。

图10
完全圆周解剖囊。

图11
筋膜边缘用运行带刺的缝合线近似。

图12
使用钉子,固定缝合线,胶水或组合来将网状物固定在直肌上。

图13
闭合后直肌鞘和腹膜,将网状物固定在后纵隔空间中并将其保持在腹腔内。
如果外科医生更喜欢底衬或不希望将网状物放置在腹膜前位置,则前面提到的技术会有所不同。在如前所述进入腹膜腔后,清除所有腹腔内粘连并清空囊。也可以进行囊的移除。通过间断缝合或带倒钩的缝合线完成缺损的闭合。随后将网状物放置在修复体上,在所有方向上具有至少5cm的重叠。网状物的固定可以通过沿周向运行的带倒钩的缝合线,间断的缝合线,钉或任何这些组合来完成。
无论使用何种技术,在疝气的先前位置进行术中放置腹部粘合剂和额外的纱布卷可以帮助减少血肿或血肿形成的机会。这种压力敷料应规定患者在任何时候都要佩戴1个月。
结论
机器人平台证明对疝气修复有益。许多研究显示其可行性和与标准腹腔镜检查相当的结果,并且一些研究显示出改善的结果,包括缩短住院时间而不显著增加成本。复杂的腹壁重建是经验丰富的机器人疝外科医生的合理选择。技术优势包括更好的可视化,改进的人体工程学设计,以及更容易解剖的动作。疝气修复的机器人选择导致微创疝修复增加,这一数字在过去十年中一直停滞不前。随着机器人平台的更多可用性和更多的外科医生获得经验和培训,作者期望看到更多的微创疝修复。
参考:
Current perspectives in robotic hernia repair
1. Lichtenstein IL, Shulman AG. Ambulatory outpatient hernia surgery. Including a new concept, introducing tension-free repair. Int Surg. 1986;71(1):1–4. [PubMed] [Google Scholar]
2. Legutko J, Pach R, Solecki R, Matyja A, Kulig J. Rhys historyczny leczenia chirugicznego przepuklin [The history of treatment of groin hernia] Folia Med Cracov. 2008;49(1–2):57–74. Polish. [PubMed] [Google Scholar]
3. McCormack K, Scott NW, Go PM, Ross S, Grant AM. Laparoscopic techniques versus open techniques for inguinal hernia repair. Cochrane Database Syst Rev. 2003;1:CD001785. [PubMed] [Google Scholar]
4. Tsui C, Klein R, Garabrant M. Minimally invasive surgery: national trends in adoption and future directions for hospital strategy. Surg Endosc. 2013;27(7):2253–2257. [PubMed] [Google Scholar]
5. Brown CN, Finch JG. Which mesh for hernia repair? Ann R Coll Surg Engl. 2010;92(4):272–278. [PMC free article] [PubMed] [Google Scholar]
6. Patel PP, Love MW, Ewing JA, Warren JA, Cobb WS, Carbonell AM. Risks of subsequent abdominal operations after laparoscopic ventral hernia repair. Surg Endosc. 2016 Jun 23; Epub. [PubMed] [Google Scholar]
7. Sajid MS, Ladwa N, Kalra L, McFall M, Baig MK, Sains P. A meta-analysis examining the use of tacker mesh fixation versus glue mesh fixation in laparoscopic inguinal hernia repair. Am J Surg. 2013;206(1):103–111. [PubMed] [Google Scholar]
8. Karigoudar A, Gupta AK, Mukharjee S, Gupta N, Durga CK. A prospective randomized study comparing fibrin glue versus prolene suture for mesh fixation in Lichtenstein inguinal hernia repair. Indian J Surg. 2016;78(4):288–292. [PMC free article] [PubMed] [Google Scholar]
9. Shi Z, Fan X, Zhai S, Zhong X, Huang D. Fibrin glue versus staple for mesh fixation in laparoscopic transabdominal preperitoneal repair of inguinal hernia: a meta-analysis and systematic review. Surg Endosc. 2016 Jun 28; Epub. [PubMed] [Google Scholar]
10. Morales-Conde S, Cadet H, Cano A, Bustos M, Martin J, Morales-Mendez S. Laparoscopic ventral hernia repair without sutures – double crown technique: our experience after 140 cases with a mean follow-up of 40 months. Int Surg. 2005;90(3 suppl):S56–S62. [PubMed] [Google Scholar]
11. Gonzalez AM, Romero RJ, Seetharamaiah R, Gallas M, Lamoureux J, Rabaza JR. Laparoscopic ventral hernia repair with primary closure versus no primary closure of the defect: potential benefits of the robotic technology. Int J Med Robot. 2015;11(2):120–125. [PubMed] [Google Scholar]
12. Tabbara M, Genser L, Bossi M, et al. Inguinal hernia repair using self-adhering sutureless mesh: adhesix: a 3-year follow-up with low chronic pain and recurrence rate. Am Surg. 2016;82(2):112–116. [PubMed] [Google Scholar]
13. Negro P, Gossetti F, Ceci F, D’Amore L. Made in Italy for hernia: the Italian history of groin hernia repair. Ann Ital Chir. 2016;87:118–128. [PubMed] [Google Scholar]
14. Escobar Dominguez JE, Gonzalez A, Donkor C. Robotic inguinal hernia repair. J Surg Oncol. 2015;112(3):310–314. [PubMed] [Google Scholar]
15. Reynolds W., Jr The first laparoscopic cholecystectomy. JSLS. 2001;5(1):89–94. [PMC free article] [PubMed] [Google Scholar]
16. Mathur S, Lin SY. The learning curve for laparoscopic inguinal hernia repair: a newly qualified surgeon perspective. J Surg Res. 2016;205(1):246–251. [PubMed] [Google Scholar]
17. Finley DS, Rodriguez E, Jr, Ahlering TE. Combined inguinal hernia repair with prosthetic mesh during transperitoneal robot assisted laparoscopic radical prostatectomy: a 4-year experience. J Urol. 2007;178(4 pt 1):1296–1299. discussion 1299–1300. [PubMed] [Google Scholar]
18. Joshi AR, Spivak J, Rubach E, Goldberg G, DeNoto G. Concurrent robotic trans-abdominal pre-peritoneal (TAP) herniorrhaphy during robotic-assisted radical prostatectomy. Int J Med Robot. 2010;6(3):311–314. [PubMed] [Google Scholar]
19. Escobar Dominguez JE, Ramos MG, Seetharamaiah R, Donkor C, Rabaza J, Gonzalez A. Feasibility of robotic inguinal hernia repair, a single-institution experience. Surg Endosc. 2016;30(9):4042–4048. [PubMed] [Google Scholar]
20. Waite KE, Herman MA, Doyle PJ. Comparison of robotic versus laparoscopic transabdominal preperitoneal (TAPP) inguinal hernia repair. J Robot Surg. 2016;10(3):239–244. [PubMed] [Google Scholar]
21. Segura-Sampedro JJ, Ashrafian H, Navarro-Sanchez A, Jenkins JT, Morales-Conde S, Martinez-Isla A. Small bowel obstruction due to laparoscopic barbed sutures: an unknown complication? Rev Esp Enferm Dig. 2015;107(11):677–680. [PubMed] [Google Scholar]
22. Sauerland S, Walgenbach M, Habermalz B, Seiler CM, Miserez M. Laparoscopic versus open surgical techniques for ventral or incisional hernia repair. Cochrane Database Syst Rev. 2011;3:CD007781. [PubMed] [Google Scholar]
23. Earle DB, Mark LA. Prosthetic material in inguinal hernia repair: how do I choose? Surg Clin North Am. 2008;88(1):179–201. x. [PubMed] [Google Scholar]
24. den Hartog D, Dur AH, Tuinebreijer WE, Kreis RW. Open surgical procedures for incisional hernias. Cochrane Database Syst Rev. 2008;3:CD006438. [PubMed] [Google Scholar]
25. Booth JH, Garvey PB, Baumann DP, et al. Primary fascial closure with mesh reinforcement is superior to bridged mesh repair for abdominal wall reconstruction. J Am Coll Surg. 2013;217(6):999–1009. [PubMed] [Google Scholar]
26. Stoikes N, Webb D, Powell B, Voeller G. Preliminary report of a sutureless onlay technique for incisional hernia repair using fibrin glue alone for mesh fixation. Am Surg. 2013;79(11):1177–1180. [PubMed] [Google Scholar]
27. Rives J, Pire JC, Flament JB, Convers G. Le traitement des grandes éventrations. (A propos de 133 cas.) [Treatment of large eventrations (apropos of 133 cases)] Minerva chirurgica. 1977;32(11):749–756. French. [PubMed] [Google Scholar]
28. Holihan JL, Bondre I, Askenasy EP, et al. Sublay versus underlay in open ventral hernia repair. J Surg Res. 2016;202(1):26–32. [PubMed] [Google Scholar]
29. Köhler L, Sauerland S, Meyer A, et al. Mesh implantation in onlay- or sublay- technique for closure of median ventral hernias: first results of a randomized clinical trial [Netzimplantation in Onlay–oder Sublay–Technik zum Verschluss medianer Bauchwandhernien: erste Ergebnisse einer randomisierten klinishen Studie]. Poster presented at the Congress of the German Surgical Association; Berlin, Germany. May 5, 2006. [Google Scholar]
30. Muysoms F, Campanelli G, Champault GG, et al. EuraHS: the development of an international online platform for registration and outcome measurement of ventral abdominal wall hernia repair. Hernia. 2012;16(3):239–250. [PMC free article] [PubMed] [Google Scholar]
31. LeBlanc KA, Booth WV. Laparoscopic repair of incisional abdominal hernias using expanded polytetrafluoroethylene: preliminary findings. Surg Laparosc Endosc. 1993;3(1):39–41. [PubMed] [Google Scholar]
32. Ramshaw BJ, Esartia P, Schwab J, et al. Comparison of laparoscopic and open ventral herniorrhaphy. Am Surg. 1999;65(9):827–831. discussion 831–822. [PubMed] [Google Scholar]
33. Liang MK, Clapp M, Li LT, Berger RL, Hicks SC, Awad S. Patient Satisfaction, chronic pain, and functional status following laparoscopic ventral hernia repair. World J Surg. 2013;37(3):530–537. [PubMed] [Google Scholar]
34. Halm JA, de Wall LL, Steyerberg EW, Jeekel J, Lange JF. Intra-peritoneal polypropylene mesh hernia repair complicates subsequent abdominal surgery. World J Surg. 2007;31(2):423–429. discussion 430. [PubMed] [Google Scholar]
35. Allison N, Tieu K, Snyder B, Pigazzi A, Wilson E. Technical feasibility of robot-assisted ventral hernia repair. World J Surg. 2012;36(2):447–452. [PubMed] [Google Scholar]
36. Warren JA, Cobb WS, Ewing JA, Carbonell AM. Standard laparoscopic versus robotic retromuscular ventral hernia repair. Surg Endosc. 2017;31(1):324–332. [PubMed] [Google Scholar]
37. Liang MK, Holihan JL, Itani K, et al. Ventral hernia management: expert consensus guided by systematic review. Ann Surg. 2016 Mar 15; Epub. [PubMed] [Google Scholar] |

 机器人辅助腹腔镜侧位胰肠吻合术(LPJ)治
机器人辅助腹腔镜侧位胰肠吻合术(LPJ)治
 腹腔镜安全治疗“正中弓状韧带综合征”(MA
腹腔镜安全治疗“正中弓状韧带综合征”(MA
 急性胆囊炎——紧急救治策略
急性胆囊炎——紧急救治策略
 采用腹腔镜经筋膜腹外缝合术修复因 Morgagn
采用腹腔镜经筋膜腹外缝合术修复因 Morgagn

 发表于 2019-6-10 00:00:42
发表于 2019-6-10 00:00:42
 提升卡
提升卡 置顶卡
置顶卡 沉默卡
沉默卡 喧嚣卡
喧嚣卡 变色卡
变色卡 千斤顶
千斤顶 显身卡
显身卡