马上注册,结交更多好友,享用更多功能,让你轻松玩转社区。
您需要 登录 才可以下载或查看,没有账号?注册
×
介绍
尽管一级和二级预防已经大大降低了宫颈癌的发病率,但它仍然是全世界第七大常见恶性肿瘤,在女性人群中排名第三[1]。传统上,宫颈癌的早期阶段已经接受了根治性腹部子宫切除术和盆腔淋巴结切除术,而更先进的阶段接受了放射治疗,最近接受了放化疗。
在过去的20年中,腹腔镜和计算机增强的远程手术在妇科肿瘤学中被称为机器人辅助腹腔镜手术。众所周知,腹腔镜治疗与失血较少,术后疼痛较少,住院时间较短,恢复正常活动较快以及美容效果较好有关。
此外,目前机器人手术的优点包括更快的手术时间,更高的准确性和灵活性,三维视图和震颤减少[2-4]。最近,越来越多的证据表明,腹腔镜和机器人根治性子宫切除术是早期宫颈癌的安全可行的方法,其开放手术具有相似的生存结果。
根治性子宫切除术
术语根治性子宫切除术不仅包括子宫切除术,还包括宫旁切除术。此外,盆腔淋巴结切除术是在宫颈癌的早期阶段进行的。对于IA2-IIA1期,保证进行放射性子宫切除术。尽管在淋巴结不受疾病影响的情况下,根治性子宫切除术与良好的手术结果相关,但它可能与肠道和泌尿道并发症的风险增加以及失血增加有关。历史上,在1974年,Piver等人。描述了五类根治性子宫切除术[5]。后来,在2008年,Querleu和Morrow提出了一种基于切除范围的根治性子宫切除术的新分类,并分别描述了淋巴结切除术[6]。
首次描述的腹腔镜根治性子宫切除术采用盆腔和腹主动脉旁淋巴结切除术治疗宫颈癌于1989年6月进行,并于1990年,1991年和1992年由Nezhat等人报道。 [7-9]。从那时起,鉴于妇科外科肿瘤学正朝着利用微创方法的方向发展,已有许多研究小组报告了他们在根治性腹腔镜子宫切除术,并发症以及短期和长期肿瘤学结果方面的经验。尽管腹腔镜检查优于剖腹手术的优势已经确立,但仍有一些缺点[3]。高级腹腔镜手术与较长的学习曲线相关。此外,鉴于大多数器械是非关节的,使用二维图像使得腹腔镜根治性子宫切除术具有挑战性。
最近,机器人辅助手术也成为一种替代的微创方法。 2006年,Sert等人报道了第一例机器人辅助的根治性子宫切除术。 [10],Nezhat等人于2008年报道了病例系列。和范宁等人。关于使用机器人技术治疗宫颈癌[3,11]。从那时起,许多作者已经扩大,并且已经报道了许多关于使用机器人治疗早期宫颈癌的系列。
手术技术
腹腔镜根治性子宫切除术[7,9,12]
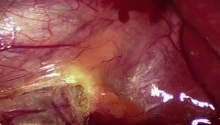
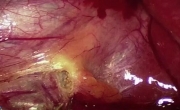
在确保获得知情同意后,该程序在全身麻醉下进行。患者处于背侧截石位,使用具有下肢压迫装置的Allen镫以防止静脉血栓形成。施用预防性抗生素,并插入尿Foley导管。作者更喜欢将子宫操纵器放置在宫颈帽转移性疾病中。评估并去除任何潜在恶性的病变。如果通过冰冻切片证实子宫外的子宫静脉疾病如附件或子宫壁到腹膜腔,则该程序被放弃。如果指出(笨重的病变),首先进行主动脉和髂总淋巴结切除术。使用超声波剪刀或电外科剪刀在骶骨岬和右髂总动脉上方进行腹膜切口。切口在右侧向上延伸,在主动脉分叉处朝向十二指肠球部切开,切除覆盖腔静脉的淋巴结。然后在主动脉表面上进行解剖,低于肠系膜下动脉的水平(图23.1)。
(1)有助于盆腔的暴露和
(2)从子宫颈描绘阴道穹窿以便以后识别阴道痉挛平面。使用四端口技术插入端口(用于摄像头的脐部中的一个位置和耻骨上放置的另外三个端口),并且进行骨盆和上腹部的仔细检查以识别
解剖扩展到主动脉分叉下方的水平,以去除主动脉分叉下方和左髂总静脉上方的淋巴结。然后在肠系膜下动脉上方的主动脉上进行解剖至左肾静脉的水平。在肠系膜下动脉下方和上方切除额外的淋巴结直至左肾静脉。冷冻切片是从可疑淋巴结获得的,如果它们是恶性肿瘤阳性,则放弃根治性子宫切除术,并且患者被转诊进行化学放射治疗。如果未发现转移性疾病,则进行根治性子宫切除术和盆腔淋巴结切除术。

图23.1低于主动脉旁淋巴结清扫术后分叉的水平
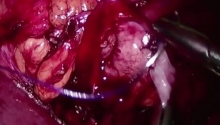
对于盆腔淋巴结切除术,骨盆壁切除在前面的圆韧带,外侧髂内血管和内侧漏斗状骨盆韧带之间的三角形中进行(图23.2a)。腹膜切开头部,在骨盆边缘水平确定输尿管,并在内侧向下追踪其插入膀胱。膀胱,闭孔和直肠间隙在上膀胱动脉的侧面和内侧发展(图23.2b-d)。
这主要通过凝固小穿孔血管的钝性解剖来实现。子宫血管的来源于下腹动脉和静脉(图23.3)。
从髂外血管,闭孔窝和下腹部血管中取出淋巴结包。对于髂外血管,淋巴结在上髂中动脉和下颌深静脉之间切除(图23.4)。作者宁愿不超越这些血管,以避免下肢淋巴水肿,除非它们与转移性疾病密切相关。对于闭孔窝,确定闭孔神经,从闭孔肌内肌动员淋巴结,并向前和向后切除神经。应仔细切除下腹部淋巴结,以避免损伤下腹部静脉。通过单独完成宫旁淋巴结的切除,可以在子宫下方继续进行解剖。
对于根治性子宫切除术,作者首先首先开发直肠阴道空间(图23.5a)。 子宫骶骨韧带之间的腹膜横向切开并向内侧延伸至阴道和直肠之间的腹膜反折。 使用轻度钝性解剖进入直肠阴道空间,将直肠向下推[7]。 使用带子宫颈帽的子宫操纵器或在阴道内放置环钳(海绵棒)也可以帮助识别这个空间。 通过切开宽韧带的前叶并使膀胱离开子宫颈和上阴道来发展膀胱阴道空间。 不同的手术方式可用于横断和干燥,如CO2激光,电外科或超声波剪等(图23.5b)。

图23.2(a)用于盆腔淋巴结切除术的右侧骨盆侧壁解剖。 (b)开发左闭孔空间。 (c)开发右侧的膀胱旁空间。 (d)发展左侧直肠空间

图23.3在下腹动脉起源水平确定子宫动脉

图23.4骨盆淋巴结清扫术后右侧骨盆侧壁
先前已经鉴定的子宫血管在其来自下腹部血管的水平处被干燥或夹住。深入和深入地进行解剖,以便可以识别,修剪和切割深部子宫静脉(图23.6a)。只要有可能,就可以识别内脏(副交感神经)神经并防止横断(图23.6b)。然后移动子宫血管并从输尿管前面旋转。然后双侧输尿管从输尿管隧道完全脱离至其插入膀胱的水平(图23.6c)。
这是通过使用具有轻微牵引力的窄尖头 - 分离器同时干燥和切割周围组织并且有时使用手术夹以避免对输尿管的热损伤来实现的。现在暴露了参数。初始肿瘤的大小决定了使用血管密封装置(超声波剪切机或腹腔镜吻合装置)对宫颈进行干燥和切割的侧面和下面的程度[13]。保留神经的手术可以通过避免横向于子宫骶骨韧带的下腹下神经横切来实现。通过在子宫颈远端约2-3cm处切开阴道来完成根治性子宫切除术。然后在子宫操纵器的宫颈帽的引导下识别阴道边缘,并使用超声波剪刀,单极剪刀,双极刮刀或钩子以圆周方式切割阴道边缘(图23.7)。

图23.5(a)发展的直肠阴道空间。 (b)开发膀胱阴道和膀胱腔

图23.6(a)在腹下动脉处切断子宫动脉。 (b)夹住子宫静脉后保留内脏神经。 (c)从输尿管旋转子宫动脉并将输尿管从宫旁切除
这也可以通过阴道完成。 使用可吸收缝合线以横向方式腹腔镜或阴道闭合阴道,小心避免扭曲输尿管或损伤膀胱/直肠(图23.8a)。 完成手术后,仔细检查腹部和骨盆,以确保在低腹腔压力下实现出色的止血效果。 作者更愿意在关闭阴道袖带后进行膀胱镜检查,以确保膀胱和输尿管的完整性(图23.8b)。
带子宫颈帽的子宫操纵器

图23.7在子宫操纵器颈椎帽的引导下切开阴道边缘

图23.8(a)腹腔镜闭合阴道袖带。 (b)完整膀胱术后膀胱镜检查
腹腔镜辅助阴道根治性子宫切除术[12,14,15]
以与上述相同的方式,通过腹腔镜进行圆形韧带的切除,骨盆侧壁解剖,以及膀胱,闭孔和直肠空间的发展以及盆腔淋巴结切除术。然而,在腹腔镜辅助阴道根治性子宫切除术中,小心膀胱切除,膀胱阴道和后阴道空间的发展,输尿管的识别,子宫动脉结扎和宫颈3cm处的宫旁结扎是阴道进行的。有关该技术的更多详细信息,请参阅Nezhat的视频辅助和机器人辅助腹腔镜检查和宫腔镜检查第4版。 (第17.6章Schauta根治阴道子宫切除术和全腹腔镜子宫切除术.Yukio Sonoda和Nadeem R. Abu-Rustum)。
机器人根治性子宫切除术[3,16-18]
继2000年FDA批准“达芬奇”机器人系统后,这项技术创新已被用于各种外科专业的各种外科手术。 2005年,在妇科领域引入机器人辅助手术,导致该创新广泛应用于各种手术,从子宫肌瘤切除术到根治性子宫切除术,用于治疗早期宫颈癌[2,11]。
该方法的优点包括坐在控制台处的外科医生的骨盆解剖结构的三维视觉。与传统的腹腔镜手术相比,该仪器的灵活性和改进的清晰度以及卓越的可视化提高了外科医生的灵活性和更短的学习曲线。另一方面,机器人辅助手术的一些缺点包括继续使用昂贵设备的手术成本增加以及手术持续时间和缺乏触觉反馈。
该手术的手术技术类似于传统的腹腔镜检查,并修改了端口位置(图23.9a)。在脐部插入12毫米端口或8毫米(Xi系统)以放置相机,并将患者置于陡峭的头低脚高位置。两个8毫米机器人端口两侧放置在脐带端口8-10厘米处,一个10-12毫米非机器人端口或一个额外的8毫米机器人辅助端口横向放置在下腹部或上腹部。机器人单极剪刀通过右侧向端口放置,有孔双极钳通过左侧端口放置(图23.9b)。随着新的机器人仪器变得可用,例如血管密封或缝合装置,它们也可以被利用。

图23.9(a)正确的机器人端口放置。 (b)右臂机械剪刀和左臂双极
自2006年以来,关于机器人辅助根治性子宫切除术在早期宫颈癌治疗中的安全性和可行性的报道很多。然而,到目前为止,没有关于随机对照试验报告的结果。
短期和长期结果
腹腔镜辅助根治性子宫切除术
自Nezhat等人的初步报告以来,许多作者报道了他们的经历[15,19]。许多研究报告减少失血,降低输血率,缩短住院时间,减少术后疼痛[20],腹腔镜手术时间与开放式根治性子宫切除术相同,同时也有类似的并发症发生率[21-23]。然而,大多数这些研究都是观察性的。一项Cochrane评价仅包括一项RCT,比较开腹与腹腔镜方法,显示相似的并发症发生率;然而,该研究没有达到小型研究数量的次要功能[24]。
在手术结果和长期存活方面,有证据表明腹腔镜方法与宫颈癌手术中的开放方法具有相似的结果。 Bogani等人。得出结论,开腹和腹腔镜根治性子宫切除术之间的5年无病生存率没​​有显著差异[20]。 Cao等人的系统评价和荟萃分析。在两种根治性子宫切除术中均表现出类似的5年无病生存期,5年生存率和复发率[25]。 Nam等人。据报道,大量宫颈癌患者在11年内接受了根治性子宫切除术。这是一项匹配的队列研究,比较腹腔镜和开放式根治性子宫切除术。平均手术时间为247分钟,平均失血量为300毫升,76名患者(29%)需要输血。术中6.8%,术后并发症9.2%。平均淋巴结计数为34,其中2.3%的患者淋巴结阳性。 5年无复发生存率为92.8%[26]。
机器人辅助根治性子宫切除术
越来越多的出版物报道了机器人辅助的根治性子宫切除术,并得出了关于并发症和手术结果的令人鼓舞的结论[4,27,28]。但是,有关长期结果的信息仍然很少。 Hoogendam等人的一大系列。与非机械治疗相比,荷兰在机器人治疗患者中表现出类似的并发症和肿瘤学结果[29]。最近对25项非随机研究进行的荟萃分析显示,机器人,腹腔镜和开放式方法对早期宫颈癌的根治性子宫切除术进行了比较,结果显示机器人方法与较低的失血量,较短的住院时间以及较少的发热性发病率和伤口并发症相关。打开根治性子宫切除术。此外,机器人和腹腔镜根治性子宫切除术之间的术中结果和并发症发生率无显著差异[30]。当使用机器人辅助方法时,许多其他研究也证实了相似的并发症发生率和相同的手术结果,包括Sert等人最近报道的一项多机构研究。 2016年4月[31]。 Mendivil等。回顾性评估宫颈癌患者的5年生存率,并得出结论,无论采用何种方法,总生存率和5年无病生存率相似[32]。
需要精心设计的长期随机对照试验来证实这些结果。目前正在进行国际多中心3期随机临床试验(LACC试验),比较腹腔镜或机器人根治性子宫切除术与早期宫颈癌患者的腹部根治性子宫切除术[33]。
成本
有关程序成本比较的数据存在争议。一些研究表明开放式方法与最高成本相关[34],而其他研究报道机器人[35]或腹腔镜根治性子宫切除术更为昂贵[36]。这些差异可归因于不同机构使用的设备差异以及成本计算方法的差异。
结论
传统的腹腔镜检查和机器人技术已经戏剧性地改变了早期宫颈癌的治疗方法。目前的结果表明,与开放式根治性子宫切除术相比,微创方法与较少的失血,较短的住院时间以及较少的发热性发病率和伤口并发症相关。在分期,无进展生存和总体生存方面,它们可能与开放式根治性子宫切除术具有相同的结果。
需要进一步随机对照试验进行长期随访以证实这些结果。
参考:Minimally Invasive Gynecology An Evidence Based Approach.pdf |

 腹腔镜胆囊切除术
腹腔镜胆囊切除术
 坏疽性胆囊 - 腹腔镜胆囊切除术及技巧
坏疽性胆囊 - 腹腔镜胆囊切除术及技巧
 改良根治性乳房切除术 - 第 2 部分分步讲解
改良根治性乳房切除术 - 第 2 部分分步讲解
 改良根治性乳房切除术 - 第 1 部分
改良根治性乳房切除术 - 第 1 部分

 发表于 2019-6-6 09:07:00
发表于 2019-6-6 09:07:00
 提升卡
提升卡 置顶卡
置顶卡 沉默卡
沉默卡 喧嚣卡
喧嚣卡 变色卡
变色卡 千斤顶
千斤顶 显身卡
显身卡