马上注册,结交更多好友,享用更多功能,让你轻松玩转社区。
您需要 登录 才可以下载或查看,没有账号?注册
×
49.1 引言
用于修复腹侧切口疝的最佳手术方法仍然是一个颇有争议的话题。使用微创或开放的方法,结合各种网格选择,腹壁内的位置和固定结构,产生了多种修复选择,并且不可能进行直接比较。 Rives-Stoppa技术被广泛认为是开放式VHR的黄金标准,也是我们首选的开放技术。这是通过切开后直肌鞘以便进入逆行平面,从上面的肌肉横向解剖后直肌筋膜,直到达到半月线,然后完全闭合后筋膜,将网格放置在在闭合的后侧筋膜上的直肌,以及前筋膜的再接近。这种方法的优点包括将网状物放入血管良好的容纳室中与内脏分开,并恢复原生功能解剖结构。然而,伤口发病率仍然存在问题,并且筛选选择差异很大。虽然腹腔镜检查显示伤口并发症明显减少,但这种方法需要腹腔内放置网片,并且其恢复腹壁功能解剖的能力有限。腹膜内网的长期结果研究较少。尽管设计了多种可用的屏障涂层来防止粘连,但在高达25⁜%的患者中需要进行后续的腹腔手术,并且腹腔网的存在增加了这些手术的复杂性,并造成继发性网状并发症的更高风险。再手术与手术时间较长,二次网膜感染的可能性以及肠道切除或非计划性肠切除发生率高达20⁜%的病例相关。我们用于机器人肌肉再生VHR(rRMVHR)的技术利用机器人平台以微创方法复制开放式肌肉疝修复术,赋予传统Rives-Stoppa修复与腹腔镜手术的益处,同时最大限度地减少每种方法的负面影响。
49.2 当前文献综述
2003年首次报道了该机器人用于腹疝修复的情况。Ballantyne报道了2例使用标准腹膜内置入网片进行远端机械修复的小缺损患者。使用猪模型,Schluender还描述了腹腔网修复技术,重点在于将网内缝合到腹壁,作为潜在地减少与腹腔镜VHR期间用于固定网的传统定位装置和经筋膜缝合线相关的术后疼痛的手段。这种技术的采用非常有限,因为这些最初的描述仅仅发布了一些小案例系列。 rVHR的第一个系列报道结果包括11例腹膜后网片置入和体外网内缝合修复的患者。发生三种并发症(27⁜%),包括套针疝,术后肠梗阻和未确认的肠切开术。 2012年,Allison等人报道了一系列13位患者,他们采用了类似的技术,常规闭合体内疝缺损,然后腹腔内放置网膜。一名患者发生复发,一名患者术后尿潴留,另两名患者因疼痛控制住院时间延长。迄今为止发表的最大系列报道了一种混合腹腔镜 - 机器人方法,比较67名使用完全腹腔镜方法修复的患者,其中67名患有疝缺陷的患者机器人关闭。在所有情况下,腹膜内放置网状物并用钉固定,然后在腹腔镜非闭合组中经腹缝合,或者将体内放置的缝合线置于机器人组的腹壁。总体而言,除了手术时间较长之外,其他组之间没有区别,尽管当机器人缺陷闭合时出现并发症和复发率较低的趋势。 Sugiyama等报道了3例患者进行了机器人腹膜前修复。短期随访无并发症。最后,Abdallah等人报道了第一次使用机器人对5名患有与直径相关的小疝缺损的患者进行了肌肉疝修补术。该方法涉及耻骨上对接位置和经腹穿刺套管,并从上覆直肌上解剖后直肌鞘,类似于Rives Stoppa修复。这种新方法的报告允许以微创方法复制开放式肌肉后VHR,这对我们现有技术的发展具有重大影响。
49.4 外科技术
如同任何新颖的手术技术一样,我们已经随着经验的增加而发展。鉴于疝的形态不均匀,一种方法不一定适合每一种疝。缺陷大小,位置和患者身体习性都在机器人疝修复的设置和执行中发挥作用。我们最初的经历模仿了Abdallah描述的设置,将机器人对接在上部或下部中线,以便在腹部的相反极端接近疝气。为了将这种方法应用于脐下的缺陷,一个横向是必要的。然而,分离的后部护套皮瓣的管理,分别从腹部两侧对接,并且针对气胸的张力进行工作,这是机器人对VHR更广泛的适用性的障碍。为了解决这些疝特征差异和遇到的技术困难,我们的技术已经发展到包括四种单独的方法,每种方法都针对患者和疝的特点,并且每种方法都遵循与Rives-Stoppa后肌疝修补术相同的原则。
49.3 病人选择
虽然目前关于机器人疝修补的文献很少,但对于伤口并发症高危患者(如病态肥胖,吸烟者和糖尿病患者)微创手术的公认益处适用于rVHR。但是,这种方法存在局限性。皮肤和软组织完整性差的患者,如先前皮肤移植的患者,先前伤口并发症引起的瘢痕增加,慢性创伤或美观效果差,可能仍需要开放性修复。缺陷的大小和腹壁的顺应性(最好通过体检来评估)对于确定缺陷是否可以机器人关闭很重要。我们系列中闭合的最大缺损总长度为20厘米,包括中线和侧向疝缺损;最大的单个缺陷关闭了15厘米。如下所述,大于8厘米的缺陷需要采用双侧对接方式,双侧腹横肌释放(TAR)。对于较小的瑕疵,通常小于5厘米,首选单池式腹膜前方法,因为瑕疵关闭的张力较小,通常不需要肌筋膜释放。中等大小的缺陷,通常长达8厘米,采用单码头肌肉注射技术。这避免了对于小到中等大小的缺陷的不必要的TAR,但仍然提供了肌筋膜释放,以更容易重新接近前部筋膜缺陷。这些都是非常一般的指导原则,最初决定采用哪种方法通常是在手术室进行初次腹部吹气后,才能评估疝缺损的真实程度。
49.5 双-Dock法
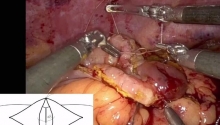
手臂伸出患者仰卧位。手术台稍微弯曲以打开髂嵴和肋缘之间的角度,并且位于与麻醉大约45°的位置,以允许机器人进入患者左侧进行对接(图49.1)。在右肋下空间使用5mm光学观察套针获得腹膜内通路。气腹建立在15 mmHg的二氧化碳(CO2)下,一个长12 mm的光学套管针置于肋缘和髂嵴之间,尽可能侧向,通常沿腋中线。气囊尖端套管针可以避免套管针回缩到腹壁或皮下空间。两个8英寸×160毫米长的机器人套管放置在肋缘和髂嵴上,肋下典型地取代最初的光学入口5毫米套针(图49.2a)。无论患者体型如何,都会使用更长的160 mm套管针,因为这样可以增加机器人手臂远离患者的空间,并且可以使机器人手术器械进入腹腔极端时具有更大的灵活性。机器人与患者手推车的中心柱对接,与臀部或大腿上部对齐(图49.2b,c)。这为机器人和病人手臂之间的床边助理提供了更多空间。
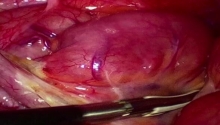
完成任何必要的粘连溶解后,逆行肌肉解剖通过切开直肠后侧约5mm的后直肌鞘开始,通常在疝缺损的边界内开始。 - 肌肉平面发育于半月形线,垂直于疝缺损上方和下方5cm以上(图49.3)。半月形线可通过穿透外侧后鞘以支配直肌的节段性神经血管束识别。它们在腹内斜肌和腹横肌之间侧向走行,并且是开始腹横肌释放时的关键标志。此外,斜向外侧直肌鞘的插入可以看作是神经血管束外侧的密集筋膜凝结,并且当向后鞘施加后缩回时会将直肌向下分散。应注意不要损伤半月板,因为这可能导致腹内斜和腹横肌之间,内斜肌和外斜肌之间的顶间平面解剖,或者甚至完全断开斜肌复合体与直肌鞘之间的连接,导致一个侧向医源性疝气。

图49.1 rVHR的操作设置。 (a)手术台从麻醉车转过45°,患者右侧为腹腔镜塔,患者左侧为机器人患者手推车,脚下为机器人视力车。 (b)床弯曲以打开肋缘和髂嵴之间的角度

图49.2套管针对rVHR的放置和对接。 (a)横向放置套管针。 (b)机器人手推车的中心柱与患者髋部对齐。 (c)以标准方式停靠
中线解剖优于和劣于缺陷对于为网格重叠创造足够的空间至关重要。 沿中线的疝缺损上方和下方的腹膜前空间必须发展至少5厘米的距离。 然后将后鞘插入到白线上,以形成从对侧后空间到同侧回旋肌空间的连续空间,使得白线完好无损。 虽然这部分解剖通常从患者的左侧开始,但在开始对侧肌肉解剖后最容易从右侧完成(图49.4)。
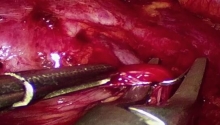
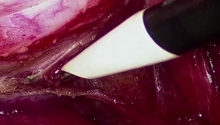
腹横肌肌筋膜释放是通过将腹横筋膜和肌肉分开在节段性神经血管束的内侧开始进行的,允许在腹膜前或前平移筋膜平面上持续的侧向解剖(图49.5a,b)。解剖继续到大约前面到腋中线。 (d)相同的横截面示意图。将腹直肌,高位疝缺损,ps后直肠鞘,nv神经血管束线和三个额外的套管针放入左侧腹部解剖的空间中,右侧镜像(图49.5c-e)。公制尺用于体内测量疝缺陷的高度和宽度以及解剖空间的范围。解剖空间的高度将与修复所需的网格长度相对应。解剖空间的左半部分被测量并假定等于所需网格宽度的一半。这可以通过将标尺放在现在躺在内脏后面的后鞘上,并将脊椎针穿过疝缺损左侧边缘的腹壁(图49.6)轻松完成。

图49.3开始肌层剥离。 (a)在左侧白线外侧的后直肌鞘切口。 (b)同样的横截面图。 (c)延长至半月的肌肉解剖

图49.4解剖疝缺损上方的中线。 ra腹直肌,高位疝缺损,la 白线,p腹膜,ps后腹直肌鞘插入白线
我们更喜欢中等重量的大孔聚丙烯丝网进行修复。选择适当大小的网片,切成我们测量的尺寸,沿着其垂直轴线滚动,用单个缝线松散地固定,并放置在后肌肉空间中。这被固定在新生左侧套管的外侧,带有缝合线或可吸收钉(图49.7)。然后患者重新定位,机器人停靠在另一侧。在右侧以与左侧相同的方式进行解剖,以完成双侧复合肌肉和横向腹部皮瓣。随着右侧复位肌肉空间打开,缺损上方和下方的中线解剖很容易完成(图49.4)。进行解剖,直到最初放置的套管针被带入后壁肌肉空间。然后用自行固定的,可缓慢吸收的2-0缝合线关闭后部筋膜缺损,从而关闭内脏囊(图49.8a,b)。将网状物穿过闭合的后鞘展开,并且再次使用缝线或大头钉将其固定在最初放置的套管针之外的右侧腹壁上(图49.8c,d)。使用自行固定的,可缓慢吸收的#1缝线以运行方式闭合前部筋膜缺损,完成疝修复(图49.9)。减少气腹以适应缺陷闭合通常是有帮助的,特别是对于较大的缺陷。在可能的情况下,封闭的疝囊包括间歇性叮咬,使疝囊增生,从而消除死腔。

图49.5腹横肌肌筋膜松解术(TAR)。 (a)通过切开TA筋膜和肌肉进入腹膜前平面开始腹横肌释放(TAR)。 (b)沿TA的腱膜部分向下延伸TAR。 切割TA的边缘用箭头表示。 (c)TAR侧向延伸至腋中线。 (d)对侧端口以镜像方式置入解剖的腹膜前空间。 (e)同样的横截面示意图。 腹直肌,nv神经血管束,腹横肌,p腹膜,横纹筋膜,ps / p后部皮瓣包括后腹直肌鞘内侧和腹膜外侧
49.6 单-Dock 技术
49.6.1 单-Dock 肌后修复
通常可以使用单Dock法来处理较小和中等尺寸的缺陷。病人的位置和房间设置相同。切开右侧直肌鞘的外侧面以进入同侧逆行区空间,而不是在对侧进行后视肌肉剥离。从侧面到内侧继续解剖,直到遇到疝缺损的线或白线边缘。切开后鞘,沿中线进入腹膜前间隙,包括解剖中线疝囊周围和减少。一旦穿过中线,左后鞘被如上所述以相同的方式切开,并且解剖部分完成到左半月线。这里的顺序略有不同。首先关闭前部筋膜缺损,然后将网片放置在前腹壁上。缺陷闭合,体内测量,网格尺寸和网格固定都与上述类似。一旦网状物被固定,后鞘被关闭以完全覆盖网状物。图49.10和49.11描绘了单Dock后肌肉技术。

图49.6体内疝缺损的测量和解剖空间的后续网布置。 (a)测量疝宽度。 (b)测量疝的长度和解剖的垂直空间。 垂直解剖对应于所需的网格长度。 (c)解剖横向空间的测量。 这是沿着解剖的后瓣向后测量的,并且对应于所需网格的一半宽度。 高位疝缺损,腹横肌横向肌肉,ps / p后壁包括后内直肌鞘内侧和腹膜外侧
49.6.2 单-Dock 腹膜前修补术
或者,通过简单地将腹膜分离在缺损周围的空间上,可以完成修复而不需要解剖肌间隔室。 闭合,网片固定和腹膜闭合遵循与上述单Dock后肌肉方法相同的顺序。 这种技术如图49.12所示,并在本文其他部分有更详细的描述。
49.6.3 单-Dock 上腹部耻骨上修补术
对于上腹或耻骨上区域的疝气,机器人可以停靠在相反的腹部区域并从中线位置接近。穿过下腹部的三个套管针,增加了一个辅助套针,可以很容易地进入上腹部,通常在肚脐上方约3厘米的范围内。在这种情况下,患者以适度反头低脚高位置放置在分离腿桌上。相反,对于耻骨上缺陷,机器人可以在头低脚高位置与患者对接。在任何一种情况下,初始后鞘切口都是横向的,从半月线开始至半月线开放,并在每侧分割后鞘以保留疝缺损上方和下方的中线。如有必要,腹横肌释放仍然可以从这些位置进行。闭合的顺序与其他单个码头的方法一样,有缺陷闭合,最后是网状放置和后部闭合。上腹部和耻骨上缺陷的修复描绘在图 49.13和49.14。

图49.7网格布局。 (a)网沿着其垂直轴线滚动并放置在新生套管下方。 (b)网片固定在左侧腹壁上。 (c)同样的横截面示意图。 m 网片,ta 腹横肌,ps / p后侧皮瓣包括后腹直肌鞘内侧腹膜和侧腹膜
49.7 结果
迄今为止,我们已经完成了超过80个真正的rRMVHRs,以及超过120个病例,包括腹膜前和腹膜内网布置。我们进行了两项比较分析,评估RMVHR对标准腹腔镜修复和开放性RM修复的结果。我们比较了美国疝协会质量协作组织(AHSQC)(一种前瞻性,疝气专用数据库)中2013年至2015年的机器人和腹腔镜手术病例。共同的截面示意图。腹横肌腹侧,后腹直肌鞘,腹直肌肌肉,156例患者,53例机器人腹腔镜和103例腹腔镜检查。患者有类似的合并症和疝气特点。与腹腔镜手术相比,机器人手术导致手术时间和血清形成时间更长,但与LVHR术后2天相比,更快的筋膜闭合率96%对50⁜%,中位停留时间(LOS)仅短于1天。有趣的是,这种差异似乎是由于与rRMVHR相关的疼痛较少,但我们无法在住院期间的麻醉要求的回顾性分析中证明这一点。组间手术部位感染没有差异。表49.1和49.2总结了这些发现。

图49.8后鞘的闭合和网格展开。(a)后鞘闭合。(b)截面示意图相同。(c)将网状物穿过闭合的后鞘。(d)十字架

图49.9关闭前筋膜/疝缺损。 (a)闭合疝缺损,并覆盖疝囊覆盖。 (b)同样的横截面图。 af前筋膜,hd疝缺损,腹直肌筋膜
虽然这是一个有用的比较评估两种微创方法对VHR的潜在益处,但这些技术是真正独特的。 为了更恰当地比较技术,我们还分析了我们最初的21个rRM-VHR与21个开放RMVHR的匹配队列相比较。 根据体重指数(BMI),疾病控制中心(CDC)伤口分类和疝宽度匹配病例。 慢性阻塞性肺病(COPD)组之间的合并症相似,在开放组中发生率更高(表49.3)。 同样,用机器人方法注意到了更长的手术时间,并且有更多的手术时间

图49.10单侧经后肌入路治疗VHR。(a)后直肌鞘横向切开。(b)肌层剥离术继续在腹股沟疝和腹股沟缺损中,在腹膜前间隙中线延伸。(c)对侧后肌剥离术。(d)由后直肌鞘构成的完整皮瓣
双侧,由中线腹膜连接。 (e)关闭疝缺陷。 (f)网眼靠在前腹壁上。 (g)关闭后鞘。 ra腹直肌,ps后腹直肌鞘,hd疝缺损,la 白线,p腹膜,af前筋膜,m网格报告。 在我们最初的机器人病例中没有发生SSI,与开放队列中的9.5⁜%相比(p⁜=⁜0.488)。 对服务水平的影响更为显着。 医院的服务水平从机器人平均4.2天开始下降到2.3天(p = 0.046)。 有趣的是,我们的基本成本分析(仅比较直接医院成本)在各组之间是相似的(表49.4)。 目前正在进行进一步的比较,并鼓励早期的结果。
49.8 结论
机器人在腹疝修复中的实用性仍然是一个有争议的问题。 但是,通过充分利用机器人平台提供的增强三维可视化和仪器关节的优势,我们能够以微创方式复制Rives-Stoppa VHR。 我们最初的比较分析的意义是显着的,因为能够复制开放式修复,具有完整的腹壁重建的好处,通过肌筋膜释放抵消沿中线闭合的张力,以及腹膜外网布置,以及腹腔镜的伤口发病率 疝修补术,可以使围手术期发病率降低的日益复杂和高风险患者进行明确的疝修补术。 这种方法的最佳患者选择仍有待确定,必须考虑机器人手术的成本。 然而,rRMVHR有可能显著改善VHR的结果。

图49.11单dock后肌肉rVHR的横截面示意图。 (a)横向切开后鞘。 (b)穿过中线的解剖,包括疝囊的减少,到对侧半月线。 (c)关闭疝缺陷。 (d)对前腹壁和后鞘闭合的网片放置

图49.12腹膜前修补小VHR。(a)腹膜从后鞘剥离,从疝缺损开始至少5厘米。(b)腹膜前剥离继续超过缺损
至少5厘米。(c)疝修补术后腹壁上放置网状物。(d)腹膜皮瓣闭合。腹直肌鞘,腹膜腹膜,HD疝,M型网

图49.13胃底缺损的单站rVHR。 (a)患者位于“劈腿”台上,穿过下腹部的套管针与机器人平行对接。 (b)后直肌鞘横切口,包括沿中线的腹膜前间隙。 (c)在疝缺损上方扩展解剖。 (d)关闭不良。 (e)将网状物放置在前腹壁上并封闭后鞘。 ra腹直肌,la 白线,ps后腹直肌鞘,p腹膜,hd疝缺损,m网

图49.14耻骨上缺损的单rVHR。 (a)后鞘的横切口。 (b)解剖双侧肌间隙和中线前腹膜间隙,保留白线。 (c)在Retzius空间进行前腹膜剥离,暴露Coopers韧带。 (d)关闭不良。 (e)对前腹壁放置网格。 (f)关闭后直肌鞘。 p腹膜,高位疝缺损,la 拆线,ps后鞘,腹直肌,cl库珀氏韧带,m网

表49.1标准腹腔镜与机器人再生肌疝修补术:人口统计学和手术细节

表49.2标准腹腔镜与机器人再生肌疝修补:结果

表49.3开放式与机器人式背肌VHR:人口统计学

表49.4开放式与机器人式背肌VHR:手术细节和结果
参考:Textbook of Hernia |

 因缺血而行小肠分段切除及一期吻合术
因缺血而行小肠分段切除及一期吻合术
 肌肉活检 _ 如何进行肌肉活检
肌肉活检 _ 如何进行肌肉活检
 尿道下裂修复后包皮瘘和龟头隐裂
尿道下裂修复后包皮瘘和龟头隐裂
 通过外部方法对喉囊肿进行有袋化或去顶
通过外部方法对喉囊肿进行有袋化或去顶

 发表于 2018-5-15 21:00:52
发表于 2018-5-15 21:00:52
 提升卡
提升卡 置顶卡
置顶卡 沉默卡
沉默卡 喧嚣卡
喧嚣卡 变色卡
变色卡 千斤顶
千斤顶 显身卡
显身卡