马上注册,结交更多好友,享用更多功能,让你轻松玩转社区。
您需要 登录 才可以下载或查看,没有账号?注册
×
36.1 引言
腹疝修补术是最常见的外科手术之一,然而,复杂性增加,修复仍然是一个持续的挑战。
Karl LeBlanc在1992年介绍了腹腔镜治疗腹疝的方法。
其复发率与开放性腹壁疝修补率相似,可导致恢复时间、住院天数减少和并发症发生率的提高。最初的技术在文献中详细描述了一种网状物放置后减少疝的内容,但不包括腹壁缺损的闭合(桥接)。
腹腔镜闭合缺损需要高度的专业灵活性,并导致手术时间较长,这可以阻止该方法。疝修补的桥接技术可导致患者功能性的问题,因为没有肌肉腱膜覆盖,导致腹壁的无张力区域。疝囊疝入疝囊内并在创面形成“死”间隙是最常见的并发症。
腹壁或切口疝修补术的主要目的是恢复腹壁解剖的完整性和直肌的一致性。
修复缺损,有两种选择:在骨盆内行缝合或间断经筋膜缝线横断。
机器人的方法允许平滑的筋膜内缝合筋膜,允许初级修复,改善生理腹壁运动,以及更大的重叠围绕缺陷边缘的网格。机器人腹股沟疝修补术还提供了增强的缝合选项,在良好的可视化修复困难的疝气与骨质边缘,如腰椎,耻骨上,肋骨下疝。
IPOM-Plus技术可将疝的大小减小到零,消除鼓胀,降低血清瘤的发生率,并减少患者的不适。 与传统的IPOM相比,它也具有复发率,模仿开放式修复。
这种技术的局限性是显而易见的。大的缺陷在没有张力的情况下是不可行的。有时需要与内窥镜部件分离技术或横断面腹部释放相结合,以降低张力并使闭合。其他挑战包括套管针放置、器械碰撞、角度困难和当指示时移除软组织。
36.3 外科技术
36.2 定义
正如国际Endohernia协会腹腔镜治疗腹侧和切口腹壁疝的指南所述,IPOM-Plus修补术是一种优越的手术方式,患者给予气管插管全身麻醉。 给予静脉内预防性抗生素。 患者仰卧位置,侧臂侧卧。
36.3.1 病人定位
36.3.2 套管针放置
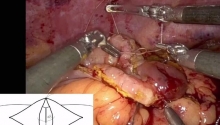
使用放置在锁骨中线左上腹下区域或没有注意到先前手术的区域的气腹针来获得腹膜腔,以避免粘连。 在建立足够的气腹后,在疝的另一侧的侧位放置一个5mm的光学端口。 尽可能远离缺陷放置端口以增加运动范围和有效性至关重要。 根据腹部的大小,使用三个或四个机器人手臂并且辅助端口的附加位置是常见的。 相机和两个器械臂的最侧面位置将允许全方位的运动,这有助于解剖和缝合疝缺陷。 附件端口用于帮助进行网格引入,牵引,抽吸,拆除缝线和缝合线切割。
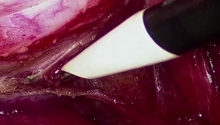
筋膜缝合包括筋膜1厘米的咬合,最大限度地减少对腹壁的创伤,机器人平台允许外科医生精确地咬合组织以锚定网片修复。 通过使用带钩的V-loc缝线(Covidien)或Stratafix缝线(Ethicon)可以促进缺损的成功初步闭合。
缝线通过8毫米dV套管针或附件端口引入腹腔内。 通过稍微打开和弯曲针头将有利于引入和随后的缝合线的移除将在使用8mm套针时实现。
36.4.1 网格的放置与运行
36.3.3 对接
缝合
在机器人对接之前必须进行患者位置操作。机器人手推车直接驱动腹部和套针部位。机器人对接是从疝的一侧完成的,以使机器人的中心柱与目标和摄像机对准。
36.3.4 粘连松解术
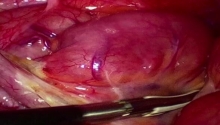
为了避免医源性腹腔脏器损伤,必须细致地进行腹壁粘连松解术,以避免疝缺损的发生。对于腹腔镜手术,粘连的裂解是最具挑战性的,但是达芬奇手术系统平台通过其三维可视化、扩展的运动范围、颤抖的精确度和优异的人体工程学来促进粘连溶解。
完全粘连是强制性的,以确保完全评价腹壁。如有必要,将镰状韧带取下,以使网片贴靠腹壁。在密集粘连的设置中,机器人高科手术刀或达芬奇血管封闭器可促进止血。
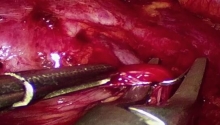
在选择筛网的大小后,将其碾压并准备插入腹腔。一旦内部,它展开和定向。通过使用涡旋技术或使用自膨式网状装置(回声网格,吟游诗人),将网定位在腹壁上,它应该通过使用全长不可吸收单丝缝线(00或0)来固定。缝线通过针夹套管针导入腹腔内。因为网格是在完全吹气期间放置的,所以很可能当腹部被解散时,网格会放松一点。可以使用一个固定装置或缝合线或一个自扩张的网状物将网格放置到前腹壁。
在运行方式中,缝合线被放置在网格的周缘周围。可能需要使用更多的缝合线来修复更大的假体。
36.4.2 端口缺陷的封闭
在完成网格固定之后,机器人被解除对接。只有辅助的10 - 12毫米套管针筋膜部位在直接腹腔镜视野下缝合器缝合关闭。
36.4 缺陷闭合
36.5 达芬奇
整个修复是在直接可视化下进行的,将精确的放置和深度确认为所有缝合线放置在后筋膜中。主要封闭缺陷的能力而不进行成分分离是基于拉米雷斯关于疝缺损的宽度和位置的原则。当然,这是基于开放的技术,而不是对抗气腹的力量。一般情况下,小于10厘米宽的缺陷适合于初次闭合,但也取决于身体惯习、年龄和腹壁顺应性。将腹腔冲洗至6~8毫米汞柱气腹可能是必要的。
采用新的系统,对接更简单,并且被设计成用户友好的。它是由一个“端口放置菜单”和一个最好的方法激光引导。
当与新手术台一起使用时,患者可以安全地重新定位而不脱离,并且该系统的学习曲线似乎比预期的短。
该机器人具有更小、更薄的臂,具有新的柔性关节,提供比早期版本更宽的运动范围,使得腹部不同区域的接触更容易。席的机器人已经多象限的外科领域优化。
该范围可以被放置到四个机器人臂中的任何一个,其自动对焦将相机重新分配到不同的端口,利用重定向功能。
腹腔镜有一个数字终端安装在清晰的摄像头顶部的范围,以改善和更好的视觉。
使用新的系统,更大的疝气双对接更容易,因为机器人臂旋转180°以适应另一侧而不移动患者或机器人的列,如在组件分离技术中。
总之,新的机器人允许更近的端口放置,双对接,而不移动病人或手术室表通过旋转臂到对侧,并有更大的范围,因为武器比以前的版本更长。
新的手术平台的创新也将改善人体工程学和微创外科手术的效率。
36.6 亮点
重建腹直肌在机器人疝气修补改善腹壁的功能。
另外的部件分离便于闭合,并且应该用于较大的缺陷。
机器人腹侧疝修补术有助于操作者通过微创切口提供传统的开放式修复技术(Rives-Stoppa)。
机器人的方法可视化整个腹壁,从而检测任何可能被修复的疝缺损,同时也可以修复。通过三维成像和高级工效学促进了缺陷的一次成功闭合。
参考:Textbook of Hernia |

 因缺血而行小肠分段切除及一期吻合术
因缺血而行小肠分段切除及一期吻合术
 肌肉活检 _ 如何进行肌肉活检
肌肉活检 _ 如何进行肌肉活检
 尿道下裂修复后包皮瘘和龟头隐裂
尿道下裂修复后包皮瘘和龟头隐裂
 通过外部方法对喉囊肿进行有袋化或去顶
通过外部方法对喉囊肿进行有袋化或去顶

 发表于 2018-5-15 20:55:25
发表于 2018-5-15 20:55:25
 提升卡
提升卡 置顶卡
置顶卡 沉默卡
沉默卡 喧嚣卡
喧嚣卡 变色卡
变色卡 千斤顶
千斤顶 显身卡
显身卡