马上注册,结交更多好友,享用更多功能,让你轻松玩转社区。
您需要 登录 才可以下载或查看,没有账号?注册
×
35.1 引言
机器人疝修补术是一种新兴的技术,它从腹腔镜和开腹疝修补术的公认原则中诞生。它在美国越来越受欢迎,或许可以通过增强的三维可视化、精确性和人机工程学来解释。传统腹腔镜的固有局限性也使得其难以在前腹壁上高手术,其中许多可以通过使用机器人器械来克服。
越来越多的文献表明,促使腹膜腔内的网状物继发于肠道侵蚀和粘连,从而可能使随后的腹部手术复杂化。 机器人平台能够利用腹壁的各个层。 事实上,任何已建立良好的腹壁手术平面都可以被利用和解剖,以便随后将网状物置于亚层位置,通过身体本身的自体组织有效地保护内脏腔。 虽然这种方法已经在传统的腹腔镜检查中得到证实,但它在技术上仍然具有挑战性。
在本章中,我们介绍机器人经腹腹膜前(rTAPP)方法治疗前腹壁疝。
35.1.1 外科解剖学
深入了解腹壁的各个层面以正确执行此技术至关重要。 r-TAPP腹疝修补技术是从传统的腹腔镜TAPP中借用的腹股沟疝,腹膜切开并从横隔筋膜切开,疝囊缩小,网状物放置在腹股沟区域。 对于前腹壁疝,腹膜前网片的尺寸是根据缺损的原始尺寸确定的,并遵循既定原则,即在所有方向保持5厘米的重叠。
这种方法最适合于不需要成分分离的较小或中等大小的疝,并且可以在非典型部位如疝、耻骨上、胸骨后和下颌骨缺损中包括疝。
作者认为在腹膜前位置放置网状物有很多优点:
1. 消除了放置涂层腹膜内网(IPOM)的要求。
2. 允许网格并入两面,消除放置全厚度横纹肌缝线固定,这是与急性和慢性疼痛。
3. 尽量减少在腹腔内留下网状物的并发症,即粘连和肠瘘。
35.1.2 术前考虑
获得一个完整的历史和物理是强制性的协调和执行一个有效的术前计划。具体而言,某些合并症,如糖尿病、肥胖、吸烟、先前疝气修补、以及腹壁感染的先前病史,可能严重影响手术方式以及手术干预的风险/效益比与警醒等待。在物理检查中发现的原发性脐疝大多数没有保证术前进一步的治疗。
腹部和骨盆的CT扫描可用于不典型疝或小到中度切口疝,以便正确诊断和描绘疝大小、位置以及疝缺损的内容。
35.2 r- TAPP疝修补术治疗脐疝或腹壁小切口疝修补术
35.2.1 病人定位
中小腹部中线缺损的患者仰卧着,双臂收缩,除非套针的位置遮蔽了侧方腹部的套管针。在这种情况下,手臂从躯干被外展90°。在小躯干患者中,将患者置于肾下卧在脐部的水平上是有帮助的(图35.1)。在获得安全的腹腔内进入后,肾脏的位置增加,增加了肋缘与髂前上棘之间的距离。这允许端口放置充分分离。病人定位必须在机器人对接之前进行。除非外科医生需要长时间的病例或疝缺损延伸到下腹部,所以一般不需要Foley导管插入。
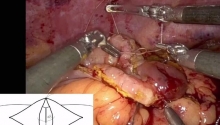
照相机的12或8毫米套针放置在缺损的同侧边缘的尽可能侧面。 作为一般规则,我们将相机套管针距离疝缺损的同侧边缘至少15厘米。 这允许在离口岸最近的一侧进行可视化,解剖和检测。 一个8毫米机器人套管针放置在下腹侧腹部,然后用8毫米套管针更换最初的5毫米光学套管针。 SI机器人的套管针的最终配置通常采用V配置(图35.2)。 通常没有必要在对侧腹部或辅助套针上增加套管针,但这可能会因医生的舒适程度而有所不同。
一旦端口被放置和定位是令人满意的,机器人直接对接在横向腹部,并与套针位点(图35.3)一致。仪器由抓握器、单极剪刀和针驱动器组成。一个30°向上的范围是用来开始的情况下,可能需要切换到0或30°向下时,进展到对侧腹部。
35.2.2 端口定位、对接和仪表
端口的定位类似于传统腹腔镜(图35.2)。重要的是将套管针尽可能地远离缺陷,而不牺牲基于与上下肢的潜在碰撞的运动范围。
任何微创手术的第一步是获得安全的腹内通路,这在多次手术的腹部中可能是困难的。 以前手术干预的场所肯定会影响该策略。 在Palmer点采用5 mm套针进行光学入口,在左上象限内有或没有初始气腹针吹气通常是安全的。

图35.1肾脏静止定位
35.2.3 粘连松解与腹膜前平面发展
与传统腹腔镜一样,前腹壁清除所有粘连,以描绘缺陷的全部程度,并揭示疝的任何其他部位。为了避免腹膜内脏器损伤,还要避免腹膜损伤,这可能会加重腹膜前夹层的发生。如果需要肠道操作,则使用较低的握力抓握器来避免医源性浆膜损伤。
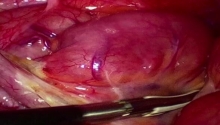
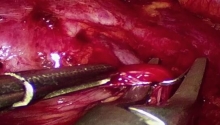
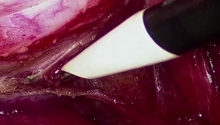
从缺损边缘开始至少5厘米处,用剪刀将腹膜切开(图35.4)。这将允许在与工作端口同侧的侧面上放置至少5cm重叠的网格。开始切口的理想位置通常在可见的直肌前脂肪内进行。解剖平面更容易以这种方式进入而不会造成上覆后鞘的破坏。腹膜前平面广泛地向头侧和尾侧方向广泛发展,结合了细致的钝性和锐利解剖。用剪刀的钝边清扫是将腹膜从后鞘分离的有效技术。谨慎使用灼烧剂以避免可能导致腹膜缺陷的热损伤。疝囊减小,进一步解剖继续侧向(图35.5)。根据缺损的原始尺寸进行宽的腹膜前解剖,以允许放置大的网格(图35.6a,b)。如果腹膜前间隙被认为不可接近,则可以在主要关闭缺陷之后将该程序转换为腹膜内涂覆的网片的放置。

图35.2 rTAPP端口位置

图35.3 rTAPP对接中线腹壁疝

图35.4腹膜切口

图35.5减少疝囊

图35.6(a)腹膜前剥离; (b)腹膜前解剖

图35.7(a)初级缺陷闭合; (b)初级缺陷关闭
35.2.4 一次闭合缺损
在广泛切开腹膜前间隙后,疝缺损主要以可吸收的带刺缝合线以闭合方式闭合(图35.7a,b)。 位于瑕疵圆顶处的皮下组织位于主关闭部位,有效地消除了前部死腔,从而将形成血肿的风险降至最低。 将腹腔清除至6-8mmHg的压力可促进初级闭合。
35.2.5 网格放置、固定和再腹膜化
通过8毫米套管针将适当大小的未涂覆的网状物引入腹腔。网状物被放置在腹壁上,并用放置在基点上的钉或缝合线固定(图35.8A,B)。最小的固定点被用来完成对腹壁的网格近似平坦。
在充分固定后,腹膜重新接近完全覆盖网格,使用缝线或钉(图35.9a,b)。 应该修复腹膜,以便不让网眼暴露于内脏内容物。 所有10毫米或更大的端口部位都用可吸收缝线封闭。

图35.8(a)网片的放置和固定; (二)网格放置和固定

图35.9(a)对网状物进行腹膜后固定; (b)缝合腹膜后腹膜
35.3 rTAPP修复非典型疝
35.3.1 进入
典型的非典型疝气如耻骨上疝和胸骨后疝是由于解剖中的解剖学限制以及由于骨突出造成的有限的固定点,因此经典更难以修复。 需要广泛的腹膜前剥离才能获得足够的增强网格覆盖以下的缺陷闭合。 耻骨上疝需要广泛切除耻骨后空间,膀胱动员,并进入Retzius空间。
35.4 rTAPP修复耻骨上疝
35.4.1 患者定位、套管针放置和对接
足够大小的网状物,远远超出顶叶缺损的区域。这可能需要双侧肌间孔的暴露,以便在所有方向上达到5厘米的重叠。因此,需要彻底理解这些空间的解剖结构,以尽量减少损伤的可能性,并执行持久的修复,从而最小化复发风险。
患者被放置在仰卧位截石位置,双臂收拢。 为了正确识别膀胱,三路Foley管被放置。 相机端口放置在耻骨上缺损头部以上至少15厘米处。 两个仪器端口与相机套管针对齐(图35.10)。 患者被置于头低脚高位(Trendelenburg)的位置,机器人停靠在双腿之间,可以完全评估和解剖耻骨右右空间(图35.11)。
35.4.2 操作步骤
耻骨上疝的修复需要对耻骨后和ReZiUS间隙进行广泛解剖,以适应腹膜前平面,在疝缺损的上表面切开至少5厘米的头颅。解剖是广泛进行的,包括最小左右两侧脐带韧带,以适应一大片重叠网格。

图35.10耻骨上疝的位置和对接

图35.11用于耻骨上疝的对接
遇到并减少疝囊。 膀胱的上穹顶可能占据疝囊,因此需要进行仔细的解剖以避免膀胱损伤。 向膀胱内灌注200-300cc的生理盐水有助于正确识别膀胱(图35.12)。 腹股沟区(Bogros空间)是双侧发展的,以暴露库珀的韧带。 膀胱后动员显示Retzius空间(图35.13)。 这个空间可以在下方解剖,以确保网状物的足够重叠低于疝缺陷的尾部。 对于较大的耻骨上疝,双侧耻骨后空间暴露(图35.14a,b)。
疝缺损主要通过带钩的缝合线闭合(图35.15)。 部分去除腹部图35.12可能需要膀胱膨胀腔以促进缺损闭合。 然后测量腹膜前解剖的空间,并将足够大小的网片引入腹膜前空间。 放置可吸收的钉或缝线以将网固定到腹壁。 使用一系列间断的缝线将网片固定在库珀韧带的两侧,以及耻骨联合(图35.16)。 完成网片固定后,将网片用连续缝线或大头钉进行腹膜后处理。
35.5 Morgagni 疝的rTAPP修复
35.5.1 临床解剖学
由于rTAPP方法可用于下腹部疝,所以上腹部疝可适用于机器人腹膜前技术。 为了说明这种多功能性,作者描述了前膈疝的rTAPP修复,例如Morgagni疝。

图35.12膀胱扩张

图35.13 Retzius空间

图35.14(a)广泛的双侧肌腱膜解剖; (b)广泛的双侧肌层解剖

图35.15初级缺陷闭合

图35.16网格放置和固定
Morgagni或胸骨后疝被认为是紧邻胸骨剑突的罕见形式的先天性膈肌缺损。 它的疝气含量可以包括大网膜,肝脏或胃肠道的任何部分,所有这些都必须在腹膜前剥离前安全降低。 患者的定位和手术步骤类似于高位上腹和下疝疝的rTAPP修复。
35.5.2 患者定位、套管针放置和对接
患者仰卧位置,双臂收拢并填充。 相机端口通常可以放置在旁脐旁的位置,假设脐管距离剑突至少15厘米(图35.17)。 然后将两个8毫米仪器套管针放置在距相机端口10毫米处。 患者被置于轻微的反头低脚高位置,然后将机器人对接在左侧或右侧肩膀上,以允许不受阻碍地进入左侧和右侧上象限(图35.18)。 一个30°的摄像头被用来有效地观察前腹壁。

图35.17 Morgagni疝气口位置

图35.18 Morgagni疝气对接位置

图35.19 Morgagni疝腹膜切口
35.5.3 操作步骤
如上所述,进行细致的粘连松解以清除前腹壁,同时避免对腹膜的损伤。膈疝缺损的疝内容物明显减少。
腹膜切开是在剑突至少尾部5厘米处进行的(图35.19)。合并腹膜前剥离,镰状韧带也从腹壁动员,为腹膜组织的来源提供最终的腹膜再网化。一旦疝囊遇到,它就减少了。腹膜前剥离持续至缺损,包括中央腱,以允许足够的重叠。
缺损的一级关闭通过运行倒钩缝合或间断缝合进行(图35.20a,b)。

图35.20(a)膈肌缺陷闭合; (b)膈肌缺陷闭合

图35.21膈下缝合固定
根据原始缺陷尺寸选择合适的网格。 然后将网眼置于腹膜前袋内。 采用平头钉或缝线将网片固定在腹壁上。 缝合线位于肋骨边缘水平以上。 将膈下缝合线细致地放置在主要点上,以便更好地固定网状物(图35.21)。 然后通过用缝合线或钉重新逼近腹膜皮瓣来将网片腹膜后化。
35.6 结论
rTAPP方法修复腹壁和膈疝对于不需要组件分离的较小缺陷是可重现的。 这种方法不仅可以重复使用,而且在任何不需要肌筋膜促进释放的位置修复几乎任何疝都是多功能的。
该技术的潜在优势包括使腹膜内容物网片暴露的风险最小化,使用较便宜的未涂布网片的能力,以及与传统IPOM相比利用较少的腹壁固定可能减少术后疼痛。
rTAPP方法应该被认为是修复腹壁疝的另一种可能的选择。 重要的是要注意,由于许多原因,包括之前的手术介入和网片外植的需要,腹膜前平面的解剖可能是不可访问的。 因此,熟悉其他修理方法和技术是非常重要的。
参考:Textbook of Hernia |

 因缺血而行小肠分段切除及一期吻合术
因缺血而行小肠分段切除及一期吻合术
 肌肉活检 _ 如何进行肌肉活检
肌肉活检 _ 如何进行肌肉活检
 尿道下裂修复后包皮瘘和龟头隐裂
尿道下裂修复后包皮瘘和龟头隐裂
 通过外部方法对喉囊肿进行有袋化或去顶
通过外部方法对喉囊肿进行有袋化或去顶

 发表于 2018-5-15 20:54:57
发表于 2018-5-15 20:54:57
 提升卡
提升卡 置顶卡
置顶卡 沉默卡
沉默卡 喧嚣卡
喧嚣卡 变色卡
变色卡 千斤顶
千斤顶 显身卡
显身卡