马上注册,结交更多好友,享用更多功能,让你轻松玩转社区。
您需要 登录 才可以下载或查看,没有账号?注册
×
OPTIMAL MANIPULATION ANGLE FOR BEST LAPAROSCOPIC TASK PERFORMANCE Dr. SAMSON CHANDRA, SpOG. D.MASABSTRACT Optimal ‘manipulation angle’ is required for best laparoscopic task performance. The port position governs the manipulation angle, elevation angle and the azimuth angle. Correct port placement ensures optimal manipulation angle required for maximal task efficiency. Objective: To investigate the effect of manipulation angle on a specific laparoscopic task and determine the optimal manipulation angle for best task performance. Design: The standardized task was to pick up 5 polo mint pieces and stack them over a tooth pick within an endotrainer box. Manipulation angles of 30 degrees, 60 degrees, 90 degrees and 120 degrees with a fixed elevation angle of 60 degrees were investigated with an endotrainer in the surgical skills lab. The table height was fixed and the azimuth angles were equal. This exercise was executed in a random sequence by 10 surgeons. The end-point was the execution time.
Setting: Surgical skills lab in World Laparoscopy Hospital, Gurgaon, NCR Delhi Participants: Ten surgeons with previous experience in laparoscopy
Main outcome measures: The execution time (in seconds)
Results: A 60 degrees manipulation angle had the shortest execution time. Conclusion: The shortest execution time for the bimanual task was obtained with a manipulation angle of 60 degrees.
KEY WORDS
Manipulation angle, elevation angle, azimuth angle, port site, execution time INTRODUCTION
Laparoscopic surgery provides patients with less painful surgery and a more rapid recovery. Increased technological complexity, poorly adapted equipments, inappropriate placement of ports, poor techniques etc have led to increased complaints of surgeon fatigue and discomfort during laparoscopic surgery. The ergonomics of the laparoscopic operating room environment addresses the issues of efficiency, safety, and comfort for the operating team [1, 2]. Instrument manipulation in laparoscopy requires a sound ergonomic setup for optimum task performance. Tissue–Instrument–Surgeon interface is determined by number of factors like port location, task alignment and endoscope–camera assembly etc. For bimanual tasks, the ease of performance of laparoscopic procedures and its execution time is determined by the manipulation, elevation and azimuth angles which in turn are determined by location of the port sites. The manipulation angle is the angle between the two instruments (active and assisting). The azimuth angle is the angle between the instrument and the optical axis of the endoscope. The elevation angle is the angle between the instrument and the horizontal plane. Optimal manipulation, elevation and azimuth angles are required for maximal laparoscopic task performance [3]. OBJECTIVE
The aim of the study was to investigate the effect of manipulation angle on endoscopic task performance.
METHODS
Task
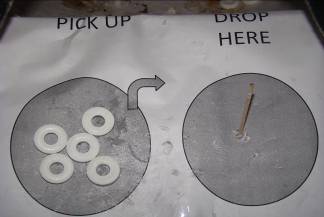
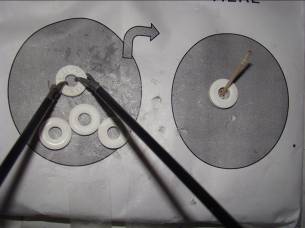
The standardized bimanual task was to pick up 5 polo mint pieces and stack them over a tooth pick within an endotrainer box. Each polo mint piece had to be stabilized with 2 Maryland dissectors, then picked up with the Maryland dissector in the left hand, transferred to the Maryland dissector in the right hand, and finally dropped over a tooth pick. The assembled task rig was stabilized in place inside an endotrainer. Ergonomics of Setup
The endotrainer was placed on a table of fixed height. A 30 degree telescope was introduced into the endotrainer box and kept at a distance of 10 cm from the target. The camera position was fixed to eliminate the variability of the camera operator. Four pairs of port sites were designed in such a way that, when Maryland dissectors were introduced through the ports into the trainer box, it formed a manipulation angle of 45 degrees, 60 degrees, 90 degrees and 120 degrees. The elevation angle was fixed at 60 degrees and the azimuth angles were equal. The monitor was located in front of the surgeon at eye level, with a distance of 1.2 m from the surgeon to provide the best direction for viewing the monitor. Experiments were conducted in the same environment and under the same illumination conditions.
Picture 1: Endotrainer Setting
Picture 2: Task Rig – Polo mint and Tooth Pick
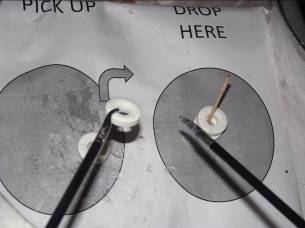
Picture 3: Step 1 of Task – Stabilizing polo mint with 2 Maryland dissectors
Picture 4: Step 2 of Task – Picking up polo mint with the left Maryland dissector
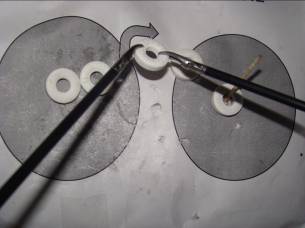
Picture 5: Step 3 of Task – Transferring the polo mint from the left Maryland dissector to the right Maryland dissector
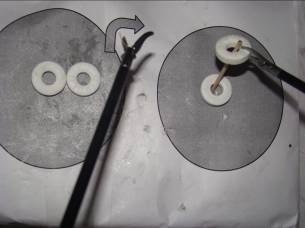
Picture 6: Step 4 of Task – Placing the polo mint over a tooth pick with the right Maryland dissector
Picture 7: Manipulation Angle 30 degrees
Picture 8: Hand, Arm & Shoulder Position at Manipulation Angle 30 degrees
Picture 9: Manipulation Angle 60 degrees
Picture 10: Hand, Arm & Shoulder Position at Manipulation Angle 60 degrees
Picture 11: Manipulation Angle 90 degrees
Picture 12: Hand, Arm & Shoulder Position at Manipulation Angle 90 degrees
Picture 13: Manipulation Angle 120 degrees
Picture 14: Hand, Arm & Shoulder Position at Manipulation Angle 120 degreesSurgeons and Performance
Ten surgeons of variable previous experience in laparoscopic surgery participated in the study. Each surgeon performed the task 4 times using a manipulation angle of 45, 60, 90 and 120 degrees at random sequence.
Video-endoscopic equipments
The equipment used throughout the experiment were a 2 dimensional videoendoscopic system (Karl Storz) which included - 30 degree 10 mm endoscope
- Single chip camera
- Fiber-optic light cables 3.5 mm in diameter
- High-resolution monitor
- Halogen light source
End Point
Evaluation of the quality of performance was carried out using the execution time as criteria. Execution Time is the time interval (in seconds) between the grasping of the instruments to start the task and the retrieval of the instruments after completion of the task. Statistical Analysis
| MANIPULATION ANGLE | Surgeon
| Execution Time in Seconds |
| 30 degrees | 60 degrees | 90 degrees | 120 degrees | 1 | 123 | 92 | 112 | 118 | 2 | 126 | 87 | 106 | 122 | 3 | 120 | 90 | 116 | 124 | 4 | 118 | 95 | 112 | 123 | 5 | 122 | 92 | 114 | 130 | 6 | 116 | 85 | 114 | 132 | 7 | 114 | 82 | 108 | 119 | 8 | 117 | 97 | 109 | 120 | 9 | 121 | 90 | 110 | 122 | 10 | 116 | 88 | 111 | 120 | Mean | 119.3 | 89.8 | 111.2 | 123 |
Figure 1: Showing correlation between execution time and manipulation angle
Figure 2: Showing correlation between execution time and manipulation angle
| Manipulation Angle |
| 30 degrees | 60 degrees | 90 degrees | 120 degrees | P value | Execution Time
|
|
|
|
|
|
Results The execution time was shortest with a manipulation angle of 60 degrees in comparison with a manipulation angle of 30 degrees, 90 degrees and 120 degrees. Discussion There is no uniform consensus about port placements for advanced laparoscopic procedures. The placement of ports is currently dictated by the surgeons preference based on individual experience. The present study, designed to address this issue, indicate that the best task efficiency and performance quality are obtained with an ideal manipulation angle of 60 degrees. This can be achieved by correct placement of the ports. The base ball diamond concept is the most accepted guideline for the placement of the primary and secondary ports [8].
Manipulation angle ranging from degrees 45 to 75 degrees with equal azimuth angles is recommended. Manipulation angles below 45° or above 75° are accompanied by increased difficulty and degraded performance. The secondary or operating ports for the active and assisting instruments should be placed after the insertion of the telescope, so that the surgeon can achieve a manipulation angle as close to 60° as is possible [4]. Task efficiency was reported be better with equal azimuth angles than with unequal azimuth angles. To achieve equal azimuth angles may be difficult in many practical situations, but in principle azimuth inequality should be avoided because it degrades task efficiency [3]. There exists a direct correlation between the manipulation and the elevation angles. With a manipulation angle of 60 degrees, the corresponding optimal elevation angle which yields the shortest execution time and optimal quality performance is 60 degrees. Wide manipulation angles necessitate wide elevation angles for optimal performance and task efficiency. When a 30° manipulation angle is imposed by the anatomy or build of the patient, the elevation angle should be also 30° as this combination carries the shortest execution time. The best ergonomic layout for endoscopic surgery consists of a manipulation angle ranging from 45° to 75° with equal azimuth angles [3.] The performance level of different surgeons is variable which reflects different levels of skills. Some surgeons are more skilled than others. The majority improves with practice but reach different levels of performance [5].
Tendick et al reported the manipulation problems in laparoscopic surgery emphasizing the negative effect on the surgeon’s dexterity of the narrow degree of freedom with use of laparoscopic instruments [6]. Patkin and Isabel reviewed human interface problems in laparoscopic surgery and identified the need for an ergonomic approach to the design of the laparoscopic operating environment [7]. References: - Berguer R. Surgical technology and the ergonomics of laparoscopic instruments. Surg Endosc. 1998; 12:458-462.
- Berguer R, Forkley DL, Smith WD. Ergonomic problems associated with laparoscopic surgery. Surg Endosc 1999; 13:466-468.
- G.B. Hanna, S. Shimi, A. Cuschieri (1997) Optimal port locations for laparoscopic intracorporeal knotting. Surg Endosc 11: 397-401
- SAGES Manual Of Perioperative Care In Minimally Invasive Surgery
- Patkin M. Ergonomic aspects of surgical dexterity. Med J Aust. 1967; 2:775-777.
- Tendik, F., Jennings, R. W., Tharp, G., and Stark, L., “Sensing and manipulation problems in endoscopic surgery: experiment, analysis, and observations,” Presence, Vol. 2, pp. 66-80, 1993.
- Patkin M, Isabel L. Ergonomics, engineering and surgery of endosurgical dissection. J Royal Coll Surg Edinburgh. 1995; 40:120-132.
- Essentials of Laparoscopic Surgery –RK Mishra
- Ramon Berguer (1999) Surgery and Ergonomics. Arch Surg 134:1011-1016
R. Berguer, W.D. Smith, S. Davis (2002) An ergonomic study of the optimum operating table height for laparoscopic surgery. Surg Endosc 16:416-42 1 | 
 因缺血而行小肠分段切除及一期吻合术
因缺血而行小肠分段切除及一期吻合术
 肌肉活检 _ 如何进行肌肉活检
肌肉活检 _ 如何进行肌肉活检
 尿道下裂修复后包皮瘘和龟头隐裂
尿道下裂修复后包皮瘘和龟头隐裂
 通过外部方法对喉囊肿进行有袋化或去顶
通过外部方法对喉囊肿进行有袋化或去顶

 发表于 2013-2-7 21:57:43
发表于 2013-2-7 21:57:43







 提升卡
提升卡 置顶卡
置顶卡 沉默卡
沉默卡 喧嚣卡
喧嚣卡 变色卡
变色卡 千斤顶
千斤顶 显身卡
显身卡