马上注册,结交更多好友,享用更多功能,让你轻松玩转社区。
您需要 登录 才可以下载或查看,没有账号?注册
×

图-1. 来自本田的ASIMO是一款仿人机器人,不仅可以走路,还可以通过楼梯。

图-2. 虚拟现实头戴式耳机(A)和数据手套(B)的组合允许用户在观看活动的同时与虚拟环境交互。

图-3. 用于最佳定位的自动内窥镜系统(AESOP; Intuitive Surgical,Sunnyvale,CA)将机器人技术与语音激活相结合,以在内窥镜手术期间实现精确的照相机定位。

图-4. Zeus遥控机器人系统(Intuitive Surgical,Sunnyvale,CA)由患者侧手推车(A)和控制台(B)组成。 这是达芬奇手术系统的前身,它也包括一个控制台和一个患者侧手推车。 宙斯已经退役,离开达芬奇成为美国唯一的商用手术机器人。

图-5. 使用达芬奇系统(Intuitive Surgical,Sunnyvale,CA)获得的图像是真正的三维图像,因为双安装的内窥镜(30度或0度,A中所示)的一个图像被投影到控制台,另一个图像投射到另一只眼睛(通过B中的控制台看到)。

图-6. 一系列仪器可用于机器人。 这些仪器有6度的运动,以便于在狭小的空间中进行精细分离。

图-7. 在临床应用经口腔机器人手术之前进行了大量的临床前研究。 这些研究包括使用人体模型评估机器人手臂的最佳位置。 (From Hockstein NG, Nolan JP, O’Malley BW Jr, et al. Robotic microlaryngeal surgery: a technical feasibility study using the daVinci surgical robot and an airway mannequin. Laryngoscope 2005;115[5]:780-785.)

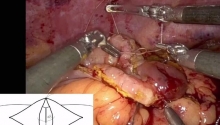
图-8. A,在机器人腋窝甲状腺手术中,使用刚性牵开器系统来保持手术口袋。 B,在腋动手术期间看到的甲状腺隔室的视图。 (From Ryu HR, Kang SW, Lee SH, et al. Feasibility and safety of a new robotic thyroidectomy through a gasless, transaxillary single-incision approach. J Am Coll Surg 2010;211[3]:e13-e19.)

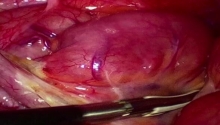
图-9. A,显示了用于机器人“整容”甲状腺切除术的切口。 B,这种方法提供了极好的甲状腺室暴露。 (From Terris DJ, Singer MC, Seybt MW. Robotic facelift thyroidectomy: II. Clinical feasibility and safety. Laryngoscope 2011;121[8]:1636-1641.)

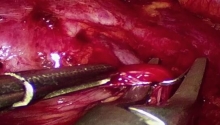
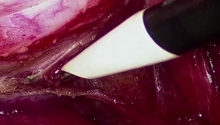
图-10. 在机器人“整容”甲状腺切除术期间看到的左侧甲状腺叶的上蒂的机器人视图。 (From Terris DJ, Singer MC, Seybt MW. Robotic facelift thyroidectomy: II. Clinical feasibility and safety. Laryngoscope 2011;121[8]:1636-1641.) |

 因缺血而行小肠分段切除及一期吻合术
因缺血而行小肠分段切除及一期吻合术
 肌肉活检 _ 如何进行肌肉活检
肌肉活检 _ 如何进行肌肉活检
 尿道下裂修复后包皮瘘和龟头隐裂
尿道下裂修复后包皮瘘和龟头隐裂
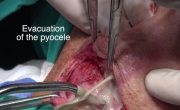 通过外部方法对喉囊肿进行有袋化或去顶
通过外部方法对喉囊肿进行有袋化或去顶

 发表于 2017-12-28 20:10:30
发表于 2017-12-28 20:10:30
 提升卡
提升卡 置顶卡
置顶卡 沉默卡
沉默卡 喧嚣卡
喧嚣卡 变色卡
变色卡 千斤顶
千斤顶 显身卡
显身卡